Первообразная и неопределённый интеграл ^1-1-1-antiderivative-section
[!info]+ Определение - Первообразная
Пусть f(x) и F(x) определены на промежутке I.
Функция F(x) называется ==первообразной== функции f(x) на промежутке I, если F(x)∈D(I) и ∀x∈IF′(x)=f(x).
Для граничной точки, если она ∈I, для производной F′(x) понимается соответствующая односторонняя производная.
То есть, если, например, I∈[a,b], то для граничных точек a и b будет браться односторонняя производная (предел при Δx→0±0).
Теорема о непрерывности первообразной Пусть F(x) и f(x) определены на промежутке I. Если F(x) - первообразная f(x), тогда F(x)∈C(I).
Доказательство F(x)∈D(I)⇒F(x)∈C(I).
По определению первообразной
Теорема о разности первообразных Две первообразные одной и той же функции f(x), определённой на промежутке I, отличаются между собой на постоянную.
Доказательство F(x) и G(x) - первообразныеf(x) на промежутке I. Зададим функцию φ(x)=F(x)−G(x).
Возьмём производную φ′(x)=(F(x)−G(x))′=F′(x)−G′(x)=f(x)−f(x)=0.
Пусть I=(a,b).
По теореме Лагранжа:∀x1,x2∈(a,b)∃c∈(x1,x2):φ(x2)−φ(x1)=φ′(c)(x2−x1).
Так как c∈(a,b)⇒φ′(c)=0⇒φ(x2)=φ(x1)∀x1,x2∈(a,b)⇒φ(x)=const.
⇒F(x)=G(x)+C.
Пусть
Теорема о множестве первообразных Пусть F(x) - какая-нибудь первообразная f(x) на интервале I. Тогда всё множество первообразных f(x) на интервале I имеет вид F(x)+C.
Доказательство
Докажем, что F(x)+C - первообразнаяf(x) на I:
(F(x)+C)′=f(x)+0=f(x).
Пусть G(x) - первообразнаяf(x) на I. G(x)=F(x)⇒G(x)−F(x)=C⇒G(x)=F(x)+C.
Определение - Неопределённый интеграл Совокупность всех первообразных функции f(x) на некотором промежутке I называется ==неопределённым интегралом== от функции f(x) на этом промежутке и обозначается: ∫f(x)dx=F(x)+C
Где:
F(x) - какая-либо первообразная f(x)
f(x) - подынтегральная функция
dx - дифференциал независимой переменной
C - постоянная интегрирования
Операция нахождения неопределённого интеграла от данной функции, то есть восстановление функции по её производной, называется ==интегрированием==.
Интегрирование представляет собой операцию, ==противоположную взятию производной==, то есть правильность совершённого интегрирования можно проверить взятием производной.
∫sinxdx=−cosx+C(−cosx+C)′=sinx
Линейность: Пусть F(x) - первообразная для f(x) на I, G(x) - первообразная для g(x) на I, α,β∈R,α2+β2=0.
Тогда для φ(x)=αf(x)+βg(x)⇒∫φ(x)dx=αF(x)+βG(x)+C
Теорема об интегрировании подстановкой (Прямая замена) Пусть φ(x) и f(x) определены в промежутках I1 и I2 соответственно, φ(x)∈I2∀x∈I1.Пусть:∫f(u)du=F(u)+CНаI2⇓∫f(φ(x))φ′(x)dx=F(φ(x))+CНаI1
Теорема об интегрировании заменой переменной (Обратная замена) φ∈D(I1), и взаимнооднозначно отображает I1 на I2, причём φ′(t)=0∀t∈I1.
Пусть f определена на I2.
Тогда, если ∫f(φ(t))φ′(t)dt=F(t)+C на I1⇒ на I2: ∫f(x)dx=F(φ−1(x))+C.
Пусть
Доказательство ∃φ−1(x) - обратная к φ(t) функция.
⇒(φ−1(x))′=φ′(φ−1(x))1 (по теореме о производной обратной функции).
Продифференцируем предполагаемый ответ F(φ−1(x)) по x:
(F(φ−1(x)))′=F′(φ−1(x))⋅(φ−1(x))′==f(φ(φ−1(x)))⋅φ′(φ−1(x))⋅φ′(φ−1(x))1=f(φ(φ−1(x)))=f(x)
Так как отображение взаимнооднозначно и производная не равна нулю,
Теорема о дифференцировании по частям u,v∈D(I), а функция u′⋅v имеет первообразную на промежутке I.
Тогда справедлива формула:
∫u(x)dv(x)=u(x)v(x)−∫v(x)du(x)
Интегралы вида ∫P(x)lnxdx,∫P(x)arcsinxdx,∫P(x)arccosxdx,∫P(x)arctanxdx, где P(x) — многочлен:
⇒ За u принимается логарифмическая или обратная тригонометрическая функция (u=lnx,arcsinx…), а dv=P(x)dx.
Интегралы вида ∫P(x)eαxdx,∫P(x)sin(αx)dx,∫P(x)cos(αx)dx:
⇒ За u принимается многочлен u=P(x), а dv=eαxdx,sin(αx)dx…
Интегралы вида ∫eαxsin(βx)dx,∫eαxcos(βx)dx (циклические):
⇒ За u можно взять любую из функций (eαx или тригонометрическую). Интегрирование по частям применяется дважды, после чего получается уравнение относительно искомого интеграла.
Пример 1 (Выбор u=P(x))
∫xe2xdx
Пусть u=x⇒du=dx.
dv=e2xdx⇒v=∫e2xdx=21e2x.
∫xe2xdx=21xe2x−∫21e2xdx=21xe2x−41e2x+C
Пример 2 (Циклический интеграл) I=∫e3xsin4xdx.
I=31∫sin4xd(e3x)=31(e3xsin4x−∫e3xd(sin4x))=31e3xsin4x−34∫e3xcos4xdx
Применим интегрирование по частям ко второму интегралу:
∫e3xcos4xdx=31∫cos4xd(e3x)=31(e3xcos4x−∫e3xd(cos4x))=31e3xcos4x+34∫e3xsin4xdx
Подставляем обратно в исходное выражение:
I=31e3xsin4x−34(31e3xcos4x+34I)=31e3xsin4x−94e3xcos4x−916I
Решаем полученное уравнение относительно I:
I+916I=31e3xsin4x−94e3xcos4x⇒925I=31e3xsin4x−94e3xcos4xI=253e3xsin4x−254e3xcos4x+C
Обозначим
Многочлены и их корни ^2-polynomials
Определение - Корень многочлена Pn(x)=anxn+an−1xn−1+⋯+a1x+a0,x∈RPn(z)=anzn+an−1zn−1+⋯+a1z+a0,z∈C
Число z0∈C называется корнемPn(z), если Pn(z0)=0.
Пусть заданы многочлены:
Теорема Безу z0∈C является корнем Pn(z)⟺Pn(z) делится на (z−z0) нацело.
То есть ∃Qn−1(z)=bn−1zn−1+⋯+b0 такой, что:
Pn(z)=(z−z0)Qn−1(z)
Число
Следствие 0 (Разложение в C)
Любой многочлен n-й степени имеет ровно n корней в множестве комплексных чисел (с учетом кратности).
Pn(z)=an(z−z1)k1(z−z2)k2…(z−zl)kl
где z1,…,zl — корни многочлена, а ∑ki=n.
Следствие 1 (Разложение в R)
Любой многочлен Pn(x) с действительными коэффициентами (x∈R,ai∈R) можно однозначно разложить на линейные и квадратичные множители:
Pn(x)=an(x−x1)k1…(x−xr)kr(x2+p1x+q1)m1…(x2+plx+ql)ml
Где xi — действительные корни, а трехчлены (x2+pix+qi) не имеют действительных корней (D<0).
Интегрирование рациональных функций ^3-rational-func
Определение Qn(x)Pm(x), где Pm и Qn — многочлены степеней m и n соответственно, причем m<n.
Знаменатель Qn(x) предварительно раскладывается на множители (по Следствию 1):
Qn(x)=A(x−a)k1(x−b)k2…(x2+p1x+q1)m1(x2+p2x+q2)m2…
Рассмотрим правильную рациональную дробь
Разложение на простейшие дроби (Метод неопределенных коэффициентов) Qn(x)Pm(x)=x−aA1+(x−a)2A2+⋯+(x−a)k1Ak1+x−bB1+⋯+(x−b)k2Bk2++x2+p1x+q1C1x+D1+⋯+(x2+p1x+q1)m1Cm1x+Dm1+…
Правильную дробь можно представить в виде суммы простейших дробей по структуре корней знаменателя:
Пример разложения (Метод неопределенных коэффициентов) ∫x3+1dx
Разложить подынтегральную функцию и найти интеграл:
1. Разложим знаменатель по формуле суммы кубов:x3+1=(x+1)(x2−x+1)
2. Представим дробь в виде суммы простейших:(x+1)(x2−x+1)1=x+1A+x2−x+1Bx+C
3. Приведем к общему знаменателю и приравняем числители:1=A(x2−x+1)+(x+1)(Bx+C)
Раскроем скобки и сгруппируем по степеням x:
0⋅x2+0⋅x+1=x2(A+B)+x(−A+B+C)+(A+C)
4. Составим систему линейных уравнений:⎩⎨⎧A+B=0−A+B+C=0A+C=1
Из первого: B=−A. Подставляем во второе: −A−A+C=0⇒C=2A.
Подставляем C в третье: A+2A=1⇒3A=1⇒A=1/3.
Итоговые коэффициенты: A=31,B=−31,C=32.
Интеграл разбивается на сумму двух: 31∫x+1dx−31∫x2−x+1x−2dx
Лекция №3.1.3-26.02.2026
LEGIT CHECK
Интегрирование тригонометрических функций ^3-trig-advanced-section
1. Интегралы вида ∫tanmxdx и ∫cotmxdx(m∈Z)
Для понижения степени используются основные тригонометрические тождества:
tan2x+1=cos2x1,cot2x+1=sin2x1
Пример ∫tan4xdx=∫tan2x(cos2x1−1)dx=∫cos2xtan2xdx−∫tan2xdx==∫tan2xd(tanx)−∫(cos2x1−1)dx=3tan3x−tanx+x+C
2. Интегралы от произведений синусов и косинусов разных аргументов
Применяются формулы преобразования произведения в сумму:
sin(αx)cos(βx)=21(sin(α−β)x+sin(α+β)x)
sin(αx)sin(βx)=21(cos(α−β)x−cos(α+β)x)
cos(αx)cos(βx)=21(cos(α−β)x+cos(α+β)x)
3. Интегралы от чётных степеней ∫sin2nxcos2mxdx
Применяются формулы понижения степени двойного угла:
sin2x=21−cos2x,cos2x=21+cos2x
Пример ∫sin42xdx=∫(21−cos4x)2dx=41∫(1−2cos4x+cos24x)dx==41x−81sin4x+41∫21+cos8xdx=41x−81sin4x+81x+641sin8x+C==83x−81sin4x+641sin8x+C
4. Рациональные функции от тригонометрии ∫R(sinx,cosx)dx
Выбор подстановки зависит от свойств чётности/нечётности функции R:
Если R(−sinx,−cosx)=R(sinx,cosx)⇒t=tanx
Если R(−sinx,cosx)=−R(sinx,cosx)⇒t=cosx
Если R(sinx,−cosx)=−R(sinx,cosx)⇒t=sinx
Универсальная подстановка:t=tan2x. Применяется, если не подошло ничего из вышеперечисленного.
Формулы перехода:
x=2arctant,dx=1+t22dtsinx=1+t22t,cosx=1+t21−t2
Пример на подстановку t=tanx
Вычислить ∫2sin2x+sinxcosx−3cos2xdx.
Делим числитель и знаменатель на cos2x:
∫2tan2x+tanx−3cos2xdx=∣t=tanx∣=∫2t2+t−3dt=21∫t2+21t−23dt
Выделяем полный квадрат: t2+21t−23=(t+41)2−1625.
21∫(t+41)2−(45)2d(t+41)=2⋅2⋅451lnt+41+45t+41−45+C=51ln2tanx+32tanx−2+C
Интегрирование иррациональных функций ^3-irrational-section
1. Дробно-линейная иррациональность ∫R(x,(cx+dax+b)n1m1,…,(cx+dax+b)nkmk)dx
Вводится подстановка:
ts=cx+dax+b
Где s — общий знаменатель (НОК) для дробей n1,n2,…,nk.
Пример ∫x+3xdx.
Степени x: 1/2 и 1/3. Общий знаменатель s=6.
Подстановка: t6=x⇒dx=6t5dt.
∫t3+t26t5dt=6∫t+1t3dt=6∫t+1t3+1−1dt=6∫t+1(t+1)(t2−t+1)−1dt==6∫(t2−t+1)dt−6∫t+1dt=2t3−3t2+6t−6ln∣t+1∣+C==2x−33x+66x−6ln∣1+6x∣+C
Для интегралов, содержащих корень из квадратного трехчлена, после выделения полного квадрата применяются подстановки:
l2−y2⇒y=lsint
l2+y2⇒y=ltant или y=lsinht
y2−l2⇒y=costl или y=lcosht
3. Интегралы вида ∫ax2+bx+cmx+ndx
Метод решения: выделение в числителе производной подкоренного выражения.
Пример ∫2−x−x2x+4dx.
Производная знаменателя: (2−x−x2)′=−1−2x.
Преобразуем числитель: x+4=−21(−2x−1)−21+4=−21(−1−2x)+27.
Разбиваем на два интеграла:
−21∫2−x−x2−1−2xdx+27∫2−x−x2dx
Первый интеграл — табличный (∫udu=2u). Во втором выделяем полный квадрат: 2−x−x2=49−(x+21)2.
=−2−x−x2+27arcsin3/2x+1/2+C=−2−x−x2+27arcsin32x+1+C
Вычислить
4. Интегралы вида ∫(mx+n)rax2+bx+cdx(r=1,2)
Вводится обратная подстановка:
t=mx+n1
Пример ∫(x+2)x2+5dx.
Подстановка t=x+21⇒x=t1−2,dx=−t21dt.
∫t1(t1−2)2+5−t21dt=−∫tt21−t4+9dt=−∫1−4t+9t2dt
Далее под корнем выделяется полный квадрат и берется длинный логарифм.
Вычислить
Лекция №4.1.4-05.03.2026
LEGIT CHECK
Определённый интеграл и геометрический смысл ^1-4-definite-integral-section
Определение - Определённый интеграл (Интеграл Римана) f(x) определена на отрезке [a,b].
Пусть функция
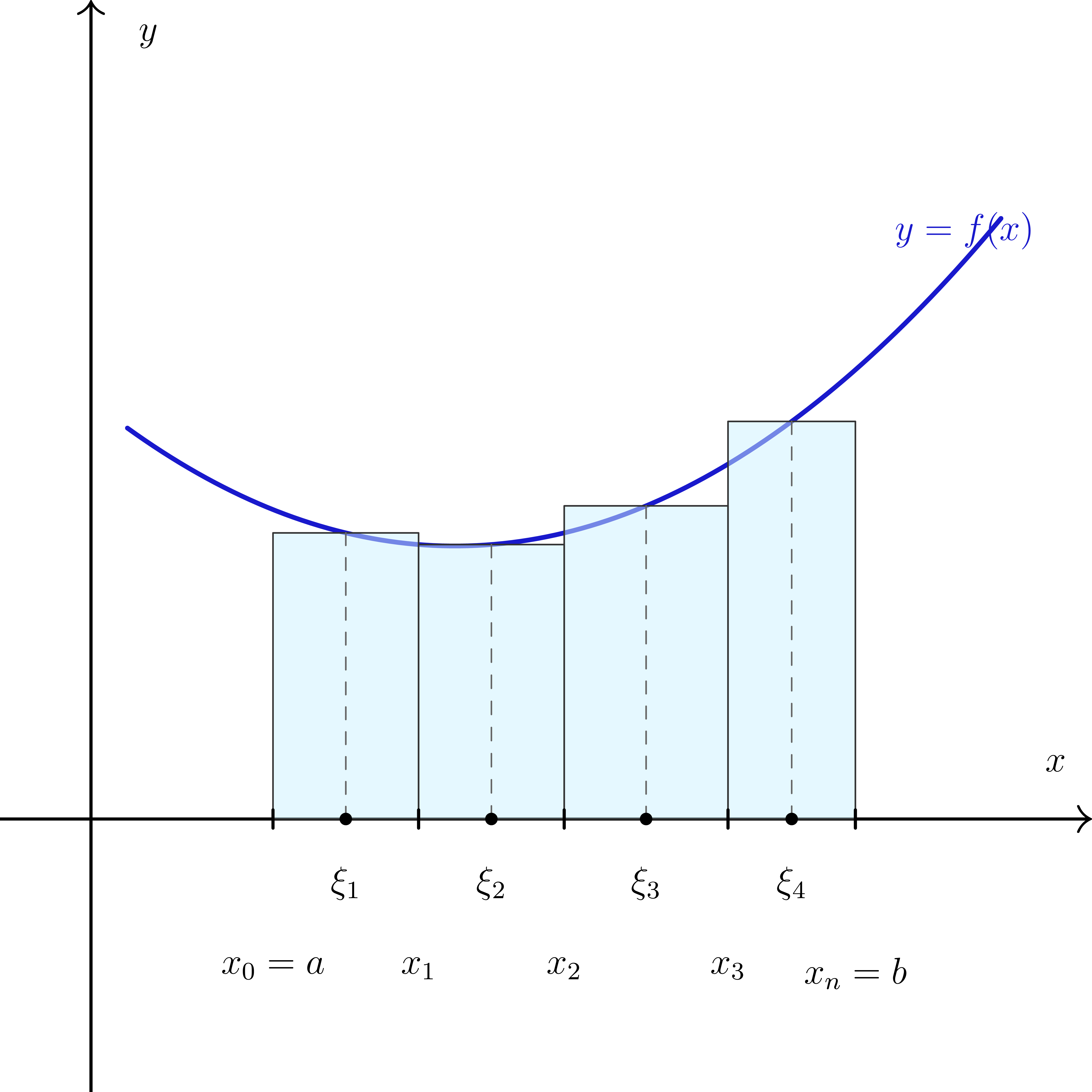
Разобьём отрезок [a,b] на n частичных отрезков точками: a=x0<x1<⋯<xn=b. Это множество точек назовём разбиением T.
Длину каждого отрезка обозначим Δxi=xi−xi−1. Наибольшую из этих длин назовём диаметром разбиенияλ(T)=maxΔxi.
Внутри каждого отрезка выберем произвольную точку ξi∈[xi−1,xi].
Сумма вида σT(ξ,f)=∑i=1nf(ξi)Δxi называется ==интегральной суммой Римана==.
Если при стремлении максимального отрезка к нулю (λ(T)→0) существует конечный предел интегральной суммы I, не зависящий от способа разбиения и выбора точек ξi, то функция называется интегрируемой по Риману на [a,b], а это число I — ==определённым интегралом==:
I=∫abf(x)dx=limλ(T)→0∑i=1nf(ξi)Δxi
Обозначение интегрируемости функции: f(x)∈R([a,b]).
Геометрический смысл (Криволинейная трапеция) f(x)≥0 равен площади криволинейной трапеции, ограниченной графиком функции y=f(x), осью OX и прямыми x=a,x=b.
Геометрически определённый интеграл от неотрицательной функции
Теорема (Необходимое условие интегрируемости) Если функция f(x) интегрируема на отрезке [a,b], то она ограничена на этом отрезке.
Доказательство (от противного) f(x)∈R([a,b]), но функция не ограничена на [a,b].
Так как интеграл существует, то ∃I=limλ(T)→0σT(ξ,f). Это значит, что для любого ε>0 (возьмём ε=1) найдётся разбиение T, для которого:
∣σT(ξ,f)−I∣<1⇒I−1<σT(ξ,f)<I+1
Зафиксируем это разбиение T. Раз функция не ограничена на всём [a,b], она не ограничена хотя бы на одном из частичных отрезков разбиения, пусть это будет Δ1=[x0,x1].
Распишем интегральную сумму, выделив первый отрезок:
σT(ξ,f)=f(ξ1)Δx1+∑i=2nf(ξi)Δxi=f(ξ1)Δx1+A
(где A — фиксированное число для выбранных ξ2,…,ξn).
Так как на Δ1 функция не ограничена, мы можем выбрать точку ξ1 так, чтобы значение f(ξ1) было сколь угодно большим (достаточно большим, чтобы выкинуть сумму σT за пределы интервала (I−1,I+1)).
Значит, условие интегрируемости не выполняется при любых ξ. Противоречие.
Пусть
Функция Дирихле и суммы Дарбу ^1-4-darboux-section
Контрпример — Функция Дирихле не интегрируема на отрезке (например, [0,1]).
D(x)={1,0,x∈Q (рациональныечисла)x∈/Q (иррациональныечисла)
Функция, которая ограничена, но
Если выбрать все ξi∈Q, то f(ξi)=1⇒σT=∑1⋅Δxi=1.
Если выбрать все ξi∈/Q, то f(ξi)=0⇒σT=∑0⋅Δxi=0.
Предел зависит от выбора точек ⇒ интеграл не существует: D(x)∈/R([0,1]).
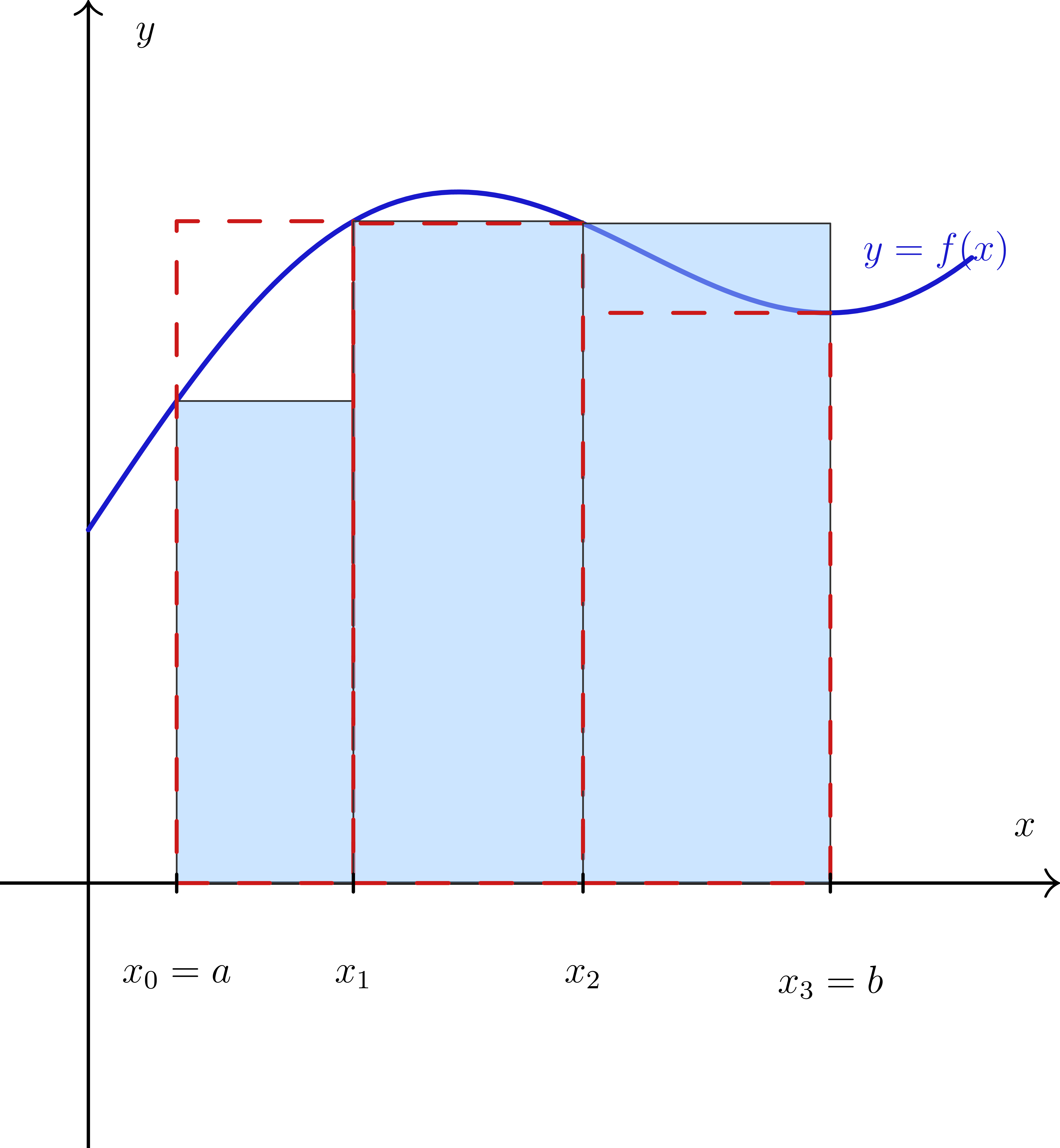
Определение - Суммы Дарбу ξ, для ограниченной на [a,b] функции вводят:
Чтобы уйти от зависимости от случайных точек
Mi=supx∈Δif(x) — точная верхняя грань (самая высокая точка на отрезке).
mi=infx∈Δif(x) — точная нижняя грань (самая низкая точка на отрезке).
Теорема (Критерий интегрируемости функции) [a,b] функция f(x) была интегрируема, необходимо и достаточно, чтобы:
limλ(T)→0(ST−sT)=0(Разница между верхней и нижней площадями должна исчезнуть при сужении отрезков).
На языке эпсилон-дельта:
∀ε>0∃δ(ε)>0:∀Tтакого, чтоλ(T)<δ⇒ST−sT<ε.
Для того чтобы ограниченная на
Классы интегрируемых функций и свойства ^1-4-classes-properties
Теоремы о классах интегрируемых функций
О непрерывной функции: Если функция f(x) непрерывна на отрезке [a,b], то она интегрируема на нём (f(x)∈C([a,b])⇒f(x)∈R([a,b])).
Следствие: Все элементарные функции интегрируемы в своей области определения.
О кусочно-непрерывной функции: Функцию называют кусочно-непрерывной на [a,b], если она непрерывна всюду, кроме конечного числа точек, где имеются разрывы I рода (скачки). Любая кусочно-непрерывная функция интегрируема.
Пример кусочно-непрерывной функции sgn(x)
Функция f(x)=sgn(x) на отрезке [−1,1] имеет скачок в нуле, но её интеграл существует и равен 0 (площади над и под осью компенсируются).
sgn(x)=⎩⎨⎧1,0,−1,x>0x=0x<0
Свойства определённого интеграла Свойство 1 (Линейность): Если f(x),g(x)∈R([a,b]), то их линейная комбинация φ(x)=αf(x)+βg(x) также ∈R([a,b]), причём:
∫ab(αf(x)+βg(x))dx=α∫abf(x)dx+β∫abg(x)dx
Доказательство φ(x):
σT(φ,ξ)=∑i=1n(αf(ξi)+βg(ξi))Δxi=α∑i=1nf(ξi)Δxi+β∑i=1ng(ξi)ΔxiσT(φ,ξ)=ασT(f,ξ)+βσT(g,ξ)
Перейдём к пределу при λ(T)→0. Так как f и g интегрируемы, пределы правых сумм существуют и равны их определённым интегралам. Значит, существует предел левой части, что и доказывает свойство:
limλ(T)→0σT(φ,ξ)=α∫abf(x)dx+β∫abg(x)dx
Запишем интегральную сумму для функции
Лекция №5.1.5-12.03.2026
LEGIT CHECK
Свойства определённого интеграла (Неравенства) ^1-5-properties-section
Свойство 7 (Сохранение знака) f(x)≥0 на [a,b] и f(x)∈R([a,b])⇒∫abf(x)dx≥0.
Если
Доказательство T, xi,i=0,n, ξi.
Так как ∀ξi:f(ξi)≥0 и Δxi>0⇒f(ξi)Δxi≥0.
Составим интегральную сумму: σT(f,ξ)=∑i=1nf(ξi)Δxi≥0.
Перейдём к пределу при λ(T)→0:
limλ(T)→0σT(f,ξ)=∫abf(x)dx≥0.
Возьмём разбиение
Геометрический смысл Свойства 7: Значение определённого интеграла от неотрицательной на заданном отрезке функции равно площади соответствующей криволинейной трапеции.
Следствие (Интегрирование неравенств) f(x),g(x)∈R([a,b]) и ∀x∈[a,b]:f(x)≥g(x)⇒∫abf(x)dx≥∫abg(x)dx.
Если
Доказательство f(x)−g(x)≥0.
По Свойству 7: ∫ab(f(x)−g(x))dx≥0.
По свойству линейности: ∫abf(x)dx−∫abg(x)dx≥0⇒∫abf(x)dx≥∫abg(x)dx.
Рассмотрим разность
Свойство 8 (Оценка модуля интеграла) f(x)∈R([a,b]), то ∣f(x)∣∈R([a,b]) и справедливо неравенство:
∫abf(x)dx≤∫ab∣f(x)∣dx
Если
Доказательство
Покажем, что ∣f(x)∣∈R([a,b]):
Зададим разбиение T, xi,Δxi. Пусть mi=infΔif(x), Mi=supΔif(x).
Разность точных граней модуля функции на любом отрезке не превосходит разности точных граней самой функции:
supΔi∣f(x)∣−infΔi∣f(x)∣≤Mi−mi.
Умножим на Δxi и просуммируем (перейдём к суммам Дарбу):
ST(∣f∣)−sT(∣f∣)≤ST(f)−sT(f).
Так как f∈R, то limλ(T)→0(ST(f)−sT(f))=0. Следовательно, и предел разности сумм Дарбу для модуля равен нулю. Значит, ∣f(x)∣∈R([a,b]).
Докажем неравенство:
Для интегральной суммы верно свойство модуля суммы:
∣σT(f)∣=∣∑i=1nf(ξi)Δxi∣≤∑i=1n∣f(ξi)∣Δxi=σT(∣f∣).
Переходя к пределу при λ(T)→0, получаем требуемое: ∫abf(x)dx≤∫ab∣f(x)∣dx.
Замечание ∣f(x)∣∈R([a,b])не обязательно следует, что f(x)∈R([a,b]).
Контрпример (модифицированная функция Дирихле):
f(x)={1,−1,x∈Qx∈/Q.
Здесь ∣f(x)∣≡1 (интегрируема), но сама f(x) не интегрируема.
Теоремы об оценке и о среднем ^1-5-mean-value-section
Теорема (Об оценке определённого интеграла) m=min[a,b]f(x), M=max[a,b]f(x) и f(x)∈C([a,b]).
Тогда m(b−a)≤∫abf(x)dx≤M(b−a).
Пусть
Доказательство m≤f(x)≤M. Проинтегрируем это двойное неравенство по отрезку [a,b] (по следствию из Свойства 7):
∫abmdx≤∫abf(x)dx≤∫abMdx.
Так как m и M — константы, ∫abmdx=m(b−a) и ∫abMdx=M(b−a). Отсюда следует утверждение теоремы.
По условию
Теорема (Обобщенная теорема о среднем) f(x),g(x)∈R([a,b]), существует m,M такие, что ∀x∈[a,b]⇒m≤f(x)≤M, и функция g(x)сохраняет знак на [a,b].
Тогда ∃μ∈[m,M]:∫abf(x)g(x)dx=μ∫abg(x)dx.
Пусть
Доказательство g(x)≥0. Умножим двойное неравенство m≤f(x)≤M на g(x):
m⋅g(x)≤f(x)g(x)≤M⋅g(x).
Проинтегрируем на [a,b]:
m∫abg(x)dx≤∫abf(x)g(x)dx≤M∫abg(x)dx(∗).
Пусть
Если ∫abg(x)dx=0, то из (∗) следует ∫abf(x)g(x)dx=0. Равенство выполняется при любом μ.
Если ∫abg(x)dx>0, разделим (∗) на этот интеграл:
m≤∫abg(x)dx∫abf(x)g(x)dx≤M.
Обозначим эту дробь за μ. Тогда μ∈[m,M] и ∫abf(x)g(x)dx=μ∫abg(x)dx.
Теорема (О среднем значении) f(x)∈C([a,b]), g(x)∈R([a,b]) и g(x) не меняет знак на [a,b].
Тогда ∃c∈[a,b]:∫abf(x)g(x)dx=f(c)∫abg(x)dx.
Пусть
Доказательство m=min[a,b]f(x), M=max[a,b]f(x).
По обобщенной теореме о среднем ∃μ∈[m,M]: ∫abf(x)g(x)dx=μ∫abg(x)dx.
Так как f(x)∈C([a,b]), по второй теореме Вейерштрасса она принимает все промежуточные значения между m и M.
Следовательно, найдется точка c∈[a,b] такая, что f(c)=μ.
Подставляя f(c) вместо μ, получаем требуемое равенство.
(Замечание: Если положить g(x)≡1, получим классическую теорему о среднем: ∫abf(x)dx=f(c)(b−a)).
Обозначим
Интеграл с переменным верхним пределом ^1-5-variable-limit-section
Определение f(x)∈R([a,b]), то для любого x∈[a,b] определена функция:
F(x)=∫axf(t)dt
называемая интегралом с переменным верхним пределом.
Если функция
Теорема о непрерывности интеграла с переменным пределом f(x)∈R([a,b])⇒F(x)∈C([a,b]).
Если
Доказательство x∈[a,b], Δx — приращение такое, что x+Δx∈[a,b].
Рассмотрим приращение функции F(x):
ΔF=F(x+Δx)−F(x)=∫ax+Δxf(t)dt−∫axf(t)dt=∫xx+Δxf(t)dt.
Так как f(x)∈R([a,b]), то f(x) ограничена: ∃M>0:∀t∈[a,b]⇒∣f(t)∣≤M.
Оценим модуль приращения (по теореме об оценке):
∣ΔF∣=∫xx+Δxf(t)dt≤∫xx+Δx∣f(t)∣dt≤M∣Δx∣.
Перейдём к пределу при Δx→0:
limΔx→0ΔF=0⇒F(x)∈C([a,b]).
Пусть
Теорема о производной интеграла с переменным верхним пределом f(x)∈R([a,b]) и непрерывна в точке x0∈[a,b] (f(x)∈C(x0)), то F(x)∈∫axf(t)dt дифференцируема в точке x0 (F(x)∈D(x0)) и:
F′(x0)=f(x0)
Если
Доказательство F′(x0)=limΔx→0ΔxΔF=limΔx→0Δx1(∫ax0+Δxf(t)dt−∫ax0f(t)dt)=limΔx→0Δx1∫x0x0+Δxf(t)dt.
Применим к интегралу теорему о среднем значении. Так как интеграл берется по отрезку [x0,x0+Δx], существует точка ξ∈[x0,x0+Δx] такая, что:
∫x0x0+Δxf(t)dt=f(ξ)⋅(x0+Δx−x0)=f(ξ)Δx.
Подставим это в предел:
limΔx→0Δx1⋅f(ξ)Δx=limΔx→0f(ξ).
Так как ξ зажата между x0 и x0+Δx, при Δx→0 точка ξ→x0. В силу непрерывности функции f в точке x0, предел limξ→x0f(ξ)=f(x0).
Следовательно, F′(x0)=f(x0).
Рассмотрим предел отношения приращения функции к приращению аргумента:
Лекция №6.1.6-19.03.2026
LEGIT CHECK
Существование первообразной и формула Ньютона-Лейбница ^1-6-newton-leibniz-section
Теорема (О существовании первообразной) f(x) непрерывна на отрезке [a,b] (f(x)∈C([a,b])), то у неё существует первообразная на этом отрезке.
Если функция
Доказательство F(x)=∫axf(t)dt дифференцируема и её производная равна F′(x)=f(x).
По определению это означает, что F(x) является одной из первообразных функции f(x) на [a,b].
Все множество первообразных задается формулой Φ(x)=∫axf(t)dt+C.
По теореме о производной интеграла с переменным верхним пределом (см. предыдущую лекцию), функция
Теорема (Формула Ньютона-Лейбница) f(x) непрерывна на отрезке [a,b] и Φ(x) — любая первообразная функции f(x) на этом отрезке, то справедлива формула:
∫abf(x)dx=Φ(x)ab=Φ(b)−Φ(a)
Если функция
Доказательство Φ(x) имеет вид:
Φ(x)=∫axf(t)dt+C.
Из предыдущей теоремы известно, что любая первообразная
Подставим x=a:
Φ(a)=∫aaf(t)dt+C=0+C⇒C=Φ(a).
Таким образом, Φ(x)=∫axf(t)dt+Φ(a).
Замена переменной и интегрирование по частям в определённом интеграле ^1-6-definite-methods-section
Теорема (О замене переменной) f(x)∈C([a,b]), а функция x=φ(t) удовлетворяет условиям:
Пусть
φ(t)∈C1([α,β]) (непрерывно дифференцируема).
φ(α)=a,φ(β)=b.
Значения функции φ(t) при t∈[α,β] не выходят за пределы отрезка [a,b].
Тогда справедлива формула:
∫abf(x)dx=∫αβf(φ(t))φ′(t)dt
Доказательство f(x) непрерывна, у нее существует первообразная Φ(x). По формуле Ньютона-Лейбница: ∫abf(x)dx=Φ(b)−Φ(a).
Рассмотрим сложную функцию Φ(φ(t)). Её производная по правилу дифференцирования сложной функции:
(Φ(φ(t)))′=Φ′(φ(t))⋅φ′(t)=f(φ(t))⋅φ′(t).
Это значит, что Φ(φ(t)) является первообразной для подынтегральной функции правой части. Применим формулу Ньютона-Лейбница к правой части:
∫αβf(φ(t))φ′(t)dt=Φ(φ(t))αβ=Φ(φ(β))−Φ(φ(α)).
Так как φ(β)=b и φ(α)=a, получаем Φ(b)−Φ(a). Левая и правая части равны.
Так как
Теорема (Об интегрировании по частям) u(x),v(x)∈C1([a,b]) (имеют непрерывные производные на отрезке). Тогда:
∫abu(x)v′(x)dx=u(x)v(x)ab−∫abv(x)u′(x)dx
Пусть функции
Замечание (Интегрирование периодической функции) f(x) — периодическая функция с периодом T (т.е. f(x+T)=f(x)).
Интеграл от такой функции по отрезку длиной T не зависит от точки начала интегрирования:
∫aa+Tf(x)dx=∫0Tf(x)dx
Пусть
Несобственные интегралы I рода (бесконечные пределы) ^1-6-improper-integrals-section
Определение f(x) определена на полуинтервале [a,+∞) и интегрируема на любом конечном отрезке [a,ξ], где ξ>a.
==Несобственным интегралом I рода== называется предел:
∫a+∞f(x)dx=limξ→+∞∫aξf(x)dx
Пусть функция
Если этот предел существует и конечен (равен числу A), говорят, что интеграл сходится (к числу A).
Если предел равен ∞ или не существует, говорят, что интеграл расходится.
Аналогично определяются интегралы для других бесконечных промежутков:
∫−∞af(x)dx=limξ→−∞∫ξaf(x)dx
∫−∞+∞f(x)dx=∫−∞cf(x)dx+∫c+∞f(x)dx(сходится, только если сходятся оба слагаемых).
Пример сходящегося интеграла I рода ∫−∞+∞1+x2dx.
Разбиваем на два интеграла в точке 0:
∫−∞01+x2dx+∫0+∞1+x2dx=limA→−∞∫A01+x2dx+limB→+∞∫0B1+x2dx==limA→−∞(arctanxA0)+limB→+∞(arctanx0B)==limA→−∞(arctan0−arctanA)+limB→+∞(arctanB−arctan0)==(0−(−2π))+(2π−0)=2π+2π=π(сходится)
Вычислить
Несобственные интегралы II рода (от неограниченных функций)
Определение f(x) определена на [a,b), не ограничена в окрестности левой точки b (т.е. на (b−δ,b) при δ>0) и интегрируема на любом отрезке [a,ξ], где ξ<b.
==Несобственным интегралом II рода== называется предел:
∫abf(x)dx=limξ→b−0∫aξf(x)dx
Аналогично для функции, неограниченной в левом конце a:
∫abf(x)dx=limξ→a+0∫ξbf(x)dx
Если точка разрыва c∈(a,b), то интеграл разбивается на сумму: ∫ac+∫cb.
Пусть функция
Стандартный интеграл II рода (Признак сходимости Дирихле/степенной) ∫01xαdx (функция неограничена при x→0).
limδ→0+∫δ1xαdx
Исследовать на сходимость
При α=1: limδ→0+(lnxδ1)=limδ→0+(0−lnδ)=+∞(расходится).
При α=1: limδ→0+(1−αx1−αδ1)=limδ→0+(1−α1−1−αδ1−α).
Если α<1⇒1−α>0, тогда δ1−α→0. Интеграл равен 1−α1(сходится).
Если α>1⇒1−α<0, тогда δ1−α=δα−11→+∞. Интеграл равен ∞(расходится).
Вывод:∫01xαdx сходится при α<1 и расходится при α≥1.
Пример вычисления ∫01xdx⇒α=1/2<1 (интеграл сходится).
Вычисление: limδ→0+∫δ1x−1/2dx=limδ→0+(2xδ1)=limδ→0+(2−2δ)=2.
Лекция №7.1.7-26.03.2026
LEGIT CHECK
Свойства несобственных интегралов ^1-7-improper-properties
Пусть задан несобственный интеграл (∗)∫abf(x)dx, где x∈[a,b), а точка b является особой (бесконечный разрыв или b=+∞).
Свойства несобственного интеграла
Линейность: Если интегралы ∫abf(x)dx и ∫abg(x)dx сходятся, то для любых констант α,β сходится интеграл от их линейной комбинации, причем:
∫ab(αf(x)+βg(x))dx=α∫abf(x)dx+β∫abg(x)dx
Связь с первообразной: Если f(x)∈C([a,b)), а F(x) — её первообразная, то интеграл (∗) сходится ⟺∃limξ→b−0F(ξ) (конечный предел).
Интегрирование по частям: Пусть u(x),v(x) определены на [a,b) и u,v∈C1([a,b)). Если ∃limξ→b−0u(ξ)v(ξ)=B=∞, то из сходимости ∫abv(x)u′(x)dx следует сходимость ∫abu(x)v′(x)dx, и справедлива формула:
∫abu(x)v′(x)dx=limξ→b−0u(ξ)v(ξ)−u(a)v(a)−∫abv(x)u′(x)dx
Замена переменной: Если f(x)∈C([a,b]), x=φ(t)∈C1([α,β]), φ(t) строго возрастает на [α,β) и φ(α)=a,limt→β−0φ(t)=b, то:
∫abf(x)dx=∫αβf(φ(t))φ′(t)dt
Сохранение неравенства: Если интегралы от f(x) и g(x) сходятся и ∀x∈[a,b)f(x)≤g(x), то:
∫abf(x)dx≤∫abg(x)dx
Доказательство свойства 5 F(ξ)=∫aξf(x)dx и G(ξ)=∫aξg(x)dx.
Так как f(x)≤g(x) на любом отрезке [a,ξ]⊂[a,b), по свойству определенных интегралов:
F(ξ)≤G(ξ)∀ξ∈[a,b)
Перейдём к пределу при ξ→b−0. Так как по условию оба несобственных интеграла сходятся, пределы существуют:
limξ→b−0F(ξ)≤limξ→b−0G(ξ)⇒∫abf(x)dx≤∫abg(x)dx
Рассмотрим интегралы с переменным верхним пределом:
Признаки сходимости несобственных интегралов 2-го рода (от неограниченных функций) ^1-7-comparison-tests-type2
Рассмотрим функции, имеющие бесконечный разрыв в точке b.
Обозначим: (∗)∫abf(x)dx и (∗∗)∫abg(x)dx.
Теорема (Признак сравнения) ∀x∈[a,b) выполняется 0≤f(x)≤g(x), то:
а) из сходимости (∗∗) следует сходимость (∗).
б) из расходимости (∗) следует расходимость (∗∗).
Если
Доказательство F(ξ)=∫aξf(x)dx и G(ξ)=∫aξg(x)dx. Так как функции неотрицательны (f,g≥0), функции F(ξ) и G(ξ) монотонно возрастают. Из неравенства f(x)≤g(x) следует F(ξ)≤G(ξ).
а) Пусть (∗∗) сходится. Значит, ∃limξ→b−0G(ξ)=B<∞.
Тогда F(ξ)≤B. Функция F(ξ) монотонно возрастает и ограничена сверху. По теореме Вейерштрасса она имеет конечный предел: ∃limξ→b−0F(ξ)=A<∞⇒(∗) сходится.
б) Пусть (∗) расходится. Предположим противное: пусть (∗∗) сходится. Но тогда по доказанному пункту (а) интеграл (∗) тоже должен сходиться. Пришли к противоречию ⇒(∗∗) расходится.
Пусть
Теорема (Предельный признак сравнения) f(x),g(x)∈C([a,b)), f(x)≥0,g(x)≥0∀x∈[a,b). В точке b функции имеют бесконечный разрыв.
Если существует конечный, отличный от нуля предел:
limx→b−0g(x)f(x)=k(0<k<∞)
То интегралы (∗) и (∗∗) сходятся или расходятся одновременно.
Пусть
Доказательство limx→b−0g(x)f(x)=k, для ∀ε>0∃δ>0, такое что ∀x∈Uδ−(b)=(b−δ,b) выполняется:
g(x)f(x)−k<ε⟺k−ε<g(x)f(x)<k+ε
Выберем ε=2k>0. Тогда:
2k<g(x)f(x)<23k
Так как g(x)>0 в этой окрестности (из-за непрерывности и положительного предела), домножим на g(x):
2kg(x)<f(x)<23kg(x)
Интегрируем эти неравенства на отрезке [c,b), где c∈Uδ−(b):
2k∫cbg(x)dx≤∫cbf(x)dx≤23k∫cbg(x)dx
Из левого неравенства (по признаку сравнения) следует, что сходимость f⇒ сходимость g, а расходимость g⇒ расходимость f.
Из правого неравенства следует, что сходимость g⇒ сходимость f, а расходимость f⇒ расходимость g.
(Замечание: ∫ab=∫ac+∫cb, сходимость несобственного интеграла зависит только от поведения на "хвосте" [c,b)). Следовательно, оба интеграла ведут себя одинаково.
По определению предела
Признаки сходимости несобственных интегралов 1-го рода (с бесконечным пределом) ^1-7-comparison-tests-type1
Обозначим: (∗)∫a+∞f(x)dx и (∗∗)∫a+∞g(x)dx.
Теорема (Признак сравнения) f(x),g(x)∈R([a,b]) для любого конечного b, и ∀x≥a⇒0≤f(x)≤g(x).
а) Если (∗∗) сходится ⇒(∗) сходится.
б) Если (∗) расходится ⇒(∗∗) расходится.
Пусть
Доказательство F(ξ)=∫aξf(x)dx и G(ξ)=∫aξg(x)dx. Из 0≤f(x)≤g(x) следует F(ξ)≤G(ξ).
Из сходимости G(ξ) к конечному пределу при ξ→+∞ по теореме Вейерштрасса (о монотонной ограниченной функции) вытекает сходимость F(ξ).
Доказательство абсолютно аналогично признаку сравнения для 2-го рода.
Вводятся
Теорема (Предельный признак сравнения) f(x)≥0,g(x)≥0∀x≥a.
Если существует конечный, отличный от нуля предел:
limx→+∞g(x)f(x)=k(0<k<∞)
То интегралы (∗) и (∗∗) сходятся или расходятся одновременно.
Пусть
Доказательство limx→+∞g(x)f(x)=k, для ∀ε>0∃M>a, такое что ∀x>M:
g(x)f(x)−k<ε
Возьмём ε=2k>0, тогда:
2k<g(x)f(x)<23k⇒2kg(x)<f(x)<23kg(x)
Проинтегрируем неравенство на хвосте [ξ,+∞), где ξ>M:
2k∫ξ+∞g(x)dx≤∫ξ+∞f(x)dx≤23k∫ξ+∞g(x)dx
На основании обычного признака сравнения (теорема выше) из этих неравенств следует одновременная сходимость или расходимость "хвостов" интегралов, а значит, и самих интегралов на $
По определению предела
Лекция №8.1.8-02.04.2026
LEGIT CHECK
Абсолютно и условно сходящиеся несобственные интегралы ^1-8-absolute-convergence
Определение ∫abf(x)dx называется ==абсолютно сходящимся==, если сходится интеграл от модуля этой функции: ∫ab∣f(x)∣dx.
В этом случае функция f(x) называется абсолютно интегрируемой на промежутке [a,b) (где b может быть как константой — точкой бесконечного разрыва, так и +∞).
Несобственный интеграл
Если ∫abf(x)dx сходится, а ∫ab∣f(x)∣dx расходится, то исходный интеграл называется ==условно сходящимся==.
Теорема о связи абсолютной и обычной сходимости ∫ab∣f(x)∣dx сходится, то интеграл ∫abf(x)dx также сходится.
При этом справедливо неравенство (модуль интеграла не превосходит интеграла от модуля):
∫abf(x)dx≤∫ab∣f(x)∣dx
Если интеграл
Пример исследования на абсолютную сходимость ∫1+∞x2sinxdx(∗)
Исследовать на сходимость:
Решение:
Рассмотрим интеграл от модуля функции:
∫1+∞x2sinxdx=∫1+∞x2∣sinx∣dx(∗∗)
Так как ∣sinx∣≤1 для любого x, справедливо неравенство:
x2∣sinx∣≤x21
Рассмотрим эталонный интеграл (справочный):
∫1+∞x2dx(∗∗∗)
Интеграл (∗∗∗) сходится (так как степень α=2>1).
По признаку сравнения, из сходимости (∗∗∗) следует сходимость (∗∗).
Так как сходится интеграл от модуля, исходный интеграл (∗)сходится абсолютно.
Приложения определенного интеграла: Площади плоских фигур ^1-8-areas
1. Площадь в декартовых координатах (Прямоугольная система) y=f2(x) (сверху) и y=f1(x) (снизу), прямыми x=a и x=b, причем f2(x)≥f1(x), то её площадь вычисляется по формуле:
S=∫ab(f2(x)−f1(x))dx
Если фигура ограничена кривыми
2. Площадь в полярных координатах (Криволинейный сектор) Полярная система координат: задается полюсом O и полярной осью. Координаты точки A(r,φ), где r=∣OA∣≥0 (полярный радиус), φ∈[0,2π] (полярный угол).
Связь с декартовыми координатами: x=rcosφ,y=rsinφ.
Пусть плоская фигура (криволинейный сектор) ограничена непрерывной кривой r=r(φ) и двумя лучами φ=α и φ=β.
Вывод формулы площади (Восстановление пропущенного куска) Δφ. Площадь элементарного сектора ΔS можно приближенно считать площадью треугольника со сторонами r(φ) и r(φ+Δφ) и углом Δφ между ними:
ΔS≈21r(φ)⋅r(φ+Δφ)⋅sin(Δφ)
Разделим на Δφ и перейдем к пределу при Δφ→0:
limΔφ→0ΔφΔS=21limΔφ→0[r(φ)⋅r(φ+Δφ)⋅Δφsin(Δφ)]
Так как r(φ) непрерывна, r(φ+Δφ)→r(φ). По первому замечательному пределу Δφsin(Δφ)→1.
Получаем производную площади по углу: S′(φ)=21r2(φ)⇒dS=21r2(φ)dφ.
1. Объём тела по известным площадям поперечных сечений OX в отрезок [a,b], и для любого x∈[a,b] известна площадь сечения этого тела плоскостью, перпендикулярной оси OX. Обозначим эту площадь S(x) (предполагаем, что S(x) непрерывна).
Пусть тело проецируется на ось
Вывод формулы [a,b] на n частей точками a=x0<x1<⋯<xn=b.
Длина каждого частичного отрезка: Δxi=xi−xi−1. Диаметр разбиения λ=maxΔxi.
В каждом отрезке выберем точку ξi∈[xi−1,xi].
Объем элементарного "слоя" тела приближенно равен объему прямого цилиндра с основанием S(ξi) и высотой Δxi:
ΔVi≈S(ξi)Δxi
Суммируем объемы слоев и переходим к пределу при λ→0 (получаем интегральную сумму Римана):
V=limλ→0∑i=1nS(ξi)Δxi=∫abS(x)dx
Разобьём отрезок
Формула:V=∫abS(x)dx
2. Объём тела вращения вокруг оси OX (Метод дисков) f(x)≥0, прямыми x=a,x=b и осью OX, вращается вокруг оси OX.
В этом случае поперечным сечением тела является круг с радиусом R=f(x).
Площадь такого сечения: S(x)=πR2=π(f(x))2.
Подставляя это в общую формулу объемов по сечениям, получаем:
VOX=π∫ab(f(x))2dx
Пусть криволинейная трапеция, ограниченная графиком непрерывной функции
3. Объём тела вращения вокруг оси OY (Метод цилиндрических оболочек) f(x)≥0,x∈[a,b]) вращается вокруг оси OY.
Нарезать тело поперек оси OY неудобно, поэтому применяется метод оболочек.
Пусть та же криволинейная трапеция (
Вывод формулы [a,b] на части Δxi. Возьмем точку ξi.
Построим прямоугольник с основанием Δxi и высотой f(ξi). При вращении этого прямоугольника вокруг оси OY образуется полый цилиндрический слой (оболочка/кольцо).
Если "развернуть" эту оболочку, она будет похожа на прямоугольный параллелепипед:
Разобьем отрезок
Длина (длина окружности вращения) =2πR=2πξi
Высота =f(ξi)
Толщина =Δxi
Элементарный объем оболочки: ΔVi≈2πξif(ξi)Δxi.
Составим интегральную сумму и перейдем к пределу:
VOY≈∑i=1n2πξif(ξi)Δxiλ→0∫ab2πxf(x)dx
Формула:VOY=2π∫abxf(x)dx
Лекция №9.1.9-09.04.2026
LEGIT CHECK
Длина дуги кривой и площадь поверхности вращения ^1-9-arc-length
Определение - Спрямляемая кривая Длиной lAB дуги AB называется предел последовательности длин вписанных в неё ломаных линий при стремлении к нулю длины наибольшего звена ломаной (λ→0).
Если этот предел существует, конечен и не зависит от способа разбиения, то сама кривая называется ==спрямляемой==.
Теорема: Если функция f(x) непрерывно дифференцируема (f(x)∈C1([a,b])), то кривая AB спрямляема.
Вывод формулы длины дуги (в декартовых координатах)
Разобьем дугу точками. Рассмотрим одно звено ломаной. Пусть Δxi>0.
По теореме Пифагора длина звена ломаной:
Δli=Δxi2+Δyi2=1+(ΔxiΔyi)2⋅Δxi
Так как функция f(x) дифференцируема, по теореме Лагранжа на отрезке [xi−1,xi] существует точка ξi такая, что ΔxiΔyi=f′(ξi).
Подставим это в формулу длины звена:
Δli=1+(f′(ξi))2Δxi
Длина всей ломаной равна сумме длин звеньев: ∑i=1n1+(f′(ξi))2Δxi.
Переходя к пределу при λ→0 (формируется интегральная сумма), получаем:
lAB=∫ab1+(f′(x))2dx
Формулы для параметрического вида и поверхности вращения Для параметрически заданной функции:
Если кривая задана системой {x=φ(t)y=ψ(t), где α≤t≤β, формула принимает вид:
lAB=∫αβ(φ′(t))2+(ψ′(t))2dt
Площадь поверхности вращения (вокруг оси OX):Sx=2π∫aby(x)1+(y′(x))2dx
Модуль II. Обыкновенные дифференциальные уравнения (ОДУ)
Лекция №9.2.9-09.04.2026
LEGIT CHECK
Введение в обыкновенные дифференциальные уравнения (ОДУ) ^2-1-ode-intro
Основные определения Дифференциальным уравнением== называется соотношение, связывающее независимую переменную x, искомую функцию y(x) и её производные до некоторого порядка n≥1:
F(x,y,y′,y′′,…,y(n))=0(1)
==
Обыкновенное (ОДУ): искомая функция зависит только от одной переменной x. (Если переменных несколько — это уравнения в частных производных).
Порядок уравнения: порядок старшей производной n, входящей в уравнение.
Решение уравнения: функция y=f(x), определенная на некотором интервале или отрезке I, имеющая производные до порядка n (f(x)∈Dn(I)), подстановка которых в уравнение (1) обращает его в тождество.
Интегральная кривая: график решения дифференциального уравнения на координатной плоскости.
Пример решения ОДУ 1-го порядка y′=2x
Интегрируя обе части, получаем общее решение: y=x2+C.
Примеры частных решений (интегральных кривых): y=x2+1, y=x2−100500.
Дано уравнение:
Геометрический смысл ОДУ 1-го порядка. Изоклина ^2-1-isoclines
ОДУ 1-го порядка имеет вид F(x,y,y′)=0, либо, если разрешено относительно производной:
y′=f(x,y)(2)
где (x,y)∈D (некоторая область определения).
Топологические определения (Область и окрестность)
==Окрестность точки== M(x0,y0) радиуса ε: множество точек, удовлетворяющих условию (x−x0)2+(y−y0)2<ε2.
==Область== D на плоскости — это множество точек, удовлетворяющее двум условиям:
Открытость: каждая точка принадлежит множеству вместе с некоторой своей окрестностью.
Связность: любые две точки множества можно соединить непрерывной линией, целиком состоящей из точек этого множества.
Геометрический смысл и Метод изоклин Геометрический смысл:
Уравнение y′=f(x,y) задает на плоскости XOY ==поле направлений==. В каждой точке (x,y)∈D функция f(x,y) определяет значение производной y′, то есть тангенс угла наклона касательной (tanα=y′) к интегральной кривой, проходящей через эту точку.
Метод изоклин:
==Изоклина== — это геометрическое место точек (ГМТ), в которых касательные к интегральным кривым имеют одно и то же направление (параллельны друг другу).
Уравнение изоклины: f(x,y)=k=const.
Задавая различные значения k, можно построить сетку изоклин, нанести на них короткие отрезки касательных под заданным углом и визуально «проявить» форму интегральных кривых.
Пример: Метод изоклин для y′=x−y2
Построим изоклины для уравнения y′=x−y2:
Пусть k=0 (касательные горизонтальны, экстремумы).
Уравнение изоклины: 0=x−y2⇒x=y2 (парабола, лежащая на боку). На этой параболе интегральные кривые имеют горизонтальную касательную.
Пусть k=1 (касательные под углом 45∘).
Уравнение изоклины: 1=x−y2⇒x=y2+1 (та же парабола, сдвинутая вправо).
Основные понятия ОДУ 1-го порядка и Задача Коши ^2-10-ode-cauchy
Определение - Непрерывность функции двух переменных f(x,y) называется непрерывной в точке M0(x0,y0), если предел функции при приближении к этой точке равен значению функции в ней:
lim(x,y)→(x0,y0)f(x,y)=f(x0,y0)
Функция
Дифференциальное уравнение первого порядка, разрешённое относительно первой производной, имеет вид:
y′=f(x,y)(1)
Пусть f(x,y) определена в некоторой области G⊂R2 (область переменных x,y).
Определение - Общее и частное решение y=f1(x,C), определенная в области D⊂R2 (область переменных x и константы C), называется ==общим решением== уравнения (1), если выполняются два условия:
Функция
Для ∀ фиксированной константы C функция y=f1(x,C) удовлетворяет уравнению (1) (обращает его в тождество).
Какова бы ни была точка (x0,y0)∈G, существует такое значение константы C=C0, что график решения проходит через эту точку: y0=f1(x0,C0).
Общее решение может быть задано неявно: Φ(x,y,C)=0 (называется общим интегралом).
Решение, проходящее через конкретную заданную точку (полученное из общего при фиксированном C), называется ==частным решением==.
Пример (Проверка общего решения) y′=y. Точка M0(x0,y0).
Общее решение: y=Cex.
Проверка: y′=(Cex)′=Cex=y (уравнение выполняется).
Найдем C для прохождения через M0: y0=Cex0⇒C=y0e−x0. Частное решение: y=(y0e−x0)ex=y0ex−x0.
Дано уравнение:
Задача Коши (Начальная задача) y′=f(x,y) дана точка M0(x0,y0) из области определения f(x,y).
Требуется найти решение уравнения, удовлетворяющее условию:
y∣x=x0=y0илиy(x0)=y0
Это условие называется начальным условием.
Для уравнения
Теорема Коши (о существовании и единственности) ^2-10-cauchy-theorem
Теорема Коши (ослабленная) f(x,y) определена и непрерывна вместе со своей частной производной∂y∂f(x,y) в некоторой области G⊂R2.
Тогда для ∀(x0,y0)∈G существует, и притом единственное, решение y=y(x), удовлетворяющее начальному условию y(x0)=y0.
Пусть функция
Геометрический смысл единственности: Любые 2 решения этого уравнения, удовлетворяющие одному и тому же начальному условию, совпадают всюду, где они оба определены (интегральные кривые не пересекаются и не касаются друг друга).
Уравнения с разделяющимися переменными ^2-10-separable-equations
Уравнение вида:
y′=f(x)g(y)(2)
Пусть f(x) и g(y) непрерывны в соответствующих областях.
Алгоритм решения
Заменяем y′=dxdy. В окрестности каждой точки, где g(y)=0, разделим уравнение на g(y) и умножим на dx:
g(y)dy=f(x)dx(Переменные разделены: слева только y, справа только x).
Интегрируем обе части:
∫g(y)dy=∫f(x)dx
Получаем: H(y)=F(x)+C, где H и F — первообразные.
Если g(y)=0, функция H(y) монотонна ⇒∃H−1. Общее решение: y=H−1(F(x)+C).
Потерянные решения:
При делении на g(y) мы могли потерять решения g(y)=0.
Если g(y)=0 при корнях y1,y2,…,yk, то постоянные функции y≡y1,y≡y2… также являются решениями исходного уравнения (2).
Пример (Нарушение единственности решения / Особое решение) y′=3y2/3
Решить уравнение:
Разделяем переменные: dxdy=3y2/3⇒y2/3dy=3dx (при условии y=0).
Интегрируем: ∫y−2/3dy=∫3dx⇒3y1/3=3x+C⇒y1/3=x+C1.
Возводим в куб, получаем общее решение: y=(x+C1)3.
Проверяем корень знаменателя: y=0. Подставляем в исходное уравнение: 0′=3⋅02/3⇒0=0. Следовательно, y≡0 — тоже решение.
Замечание (Важно!): Проверим условия Теоремы Коши для f(x,y)=3y2/3.
Найдем частную производную: ∂y∂f=3⋅32y−1/3=3y2.
В точках, где y=0, эта производная не существует!
Значит, на прямой y=0 нарушается условие теоремы Коши (единственность не гарантируется).
Действительно, через точку (0,0) проходят сразу две интегральные кривые: прямая y=0 и кубическая парабола y=x3 (при C1=0). Решение y=0 называется особым.
Дифференциальные уравнения в дифференциалах ^2-10-differentials
ОДУ часто записывают в симметричном виде (в дифференциалах):
M(x,y)dx+N(x,y)dy=0
Здесь x и y равноправны. Решением может являться как функция y=y(x), так и функция x=x(y).
В зависимости от удобства, уравнение можно разрешить:
либо относительно yx′: dxdy=−N(x,y)M(x,y)
либо относительно xy′: dydx=−M(x,y)N(x,y)
Правило записи в числителе. Нельзя оставлять dx или dy в знаменателе при интегрировании.
Дифференциал переменной, по которой идет интегрирование, всегда пишется
Пример (Работа с логарифмической константой) ydx+xdy=0
Преобразование константы: Так как C — произвольная константа, и она может быть любой, для удобства представим её как логарифм другой положительной константы: C=lnC1 (где C1>0).
Тогда: ln∣y∣=lnC1−ln∣x∣⇒ln∣y∣=ln∣x∣C1.
Потенцируем: ∣y∣=∣x∣C1⇒y=±xC1.
Заменим ±C1 на новую константу C2 (C2=0). Получим: y=xC2.
Проверка потерянных корней: Мы делили на xy.
Корень y=0 является решением (0⋅dx+x⋅0=0). Если разрешить константе C2 принимать значение 0, то y=x0=0. Значит, корень y=0 поглощается общим решением. Обозначим итоговую произвольную константу как C∈R.
Корень x=0 тоже является решением, но он не может быть получен из функции y=xC. Это вертикальная прямая (решение вида x=x(y)).
Ответ:y=xC и x=0.
Лекция №11.2.11-23.04.2026
LEGIT CHECK
Однородные дифференциальные уравнения 1-го порядка ^2-11-homogeneous-ode
Определение - Однородная функция M(x,y) называется однородной функцией степени p, если для любого k>0 выполняется тождество:
M(kx,ky)=kpM(x,y)Пример:M(x,y)=ax2+bxy+cy2⇒M(kx,ky)=k2(ax2+bxy+cy2)=k2M(x,y) (степень p=2).
Функция
Однородное ОДУ 1-го порядка однородным, если оно может быть приведено к виду:
y′=f(xy)
Либо, если оно записано в дифференциалах M(x,y)dx+N(x,y)dy=0, то функции M(x,y) и N(x,y) должны быть однородными функциями одной и той же степени.
Дифференциальное уравнение называется
Метод решения:
Применяется подстановка (замена переменной), которая сводит это уравнение к уравнению с разделяющимися переменными:
y=ux⟹y′=u′x+u(илиdy=udx+xdu)
где u=u(x) — новая неизвестная функция.
Линейные дифференциальные уравнения 1-го порядка ^2-11-linear-ode
Определение Линейным называется уравнение, в которое неизвестная функция y и её производная y′ входят линейно (то есть в первой степени и не перемножаются друг с другом):
y′=a(x)y+b(x)(1)
Если b(x)≡0, то уравнение y′=a(x)y(2) называется соответствующим однородным линейным уравнением.
Метод вариации произвольной постоянной (Метод Лагранжа)
Решаем соответствующее однородное уравнение (2):dxdy=a(x)y⟹∫ydy=∫a(x)dx⟹ln∣y∣=∫a(x)dx+ln∣C1∣
Получаем решение в виде: y=C⋅φ(x), где φ(x)=e∫a(x)dx.
Варьируем константу:
Будем искать решение исходного неоднородного уравнения (1) в виде:
y=C(x)φ(x)(3)
где C(x) — теперь неизвестная функция от x.
Подставляем (3) в исходное уравнение (1), всё лишнее сократится, и мы найдем C(x).
Пример (Метод вариации постоянной) xy′=2y−2x4⟹y′=x2y−2x3.
2. Варьируем константу:
Ищем решение в виде: y=C(x)x2.
Находим производную: y′=C′(x)x2+2xC(x).
Подставляем в исходное:
C′(x)x2+2xC(x)=x2(C(x)x2)−2x3C′(x)x2+2xC(x)=2xC(x)−2x3⟹C′(x)x2=−2x3C′(x)=−2x⟹C(x)=∫(−2x)dx=−x2+C.
3. Записываем ответ:
Подставляем найденное C(x) обратно в замену y=C(x)x2:
y=(−x2+C)x2⟹y=Cx2−x4.
Уравнение Бернулли ^2-11-bernoulli-ode
Определение Уравнением Бернулли называется уравнение вида:
y′=a(x)y+b(x)yα,α=0,α=1(4)(При α=0 оно становится линейным неоднородным, при α=1 — линейным однородным).
Если α>0, то функция y≡0 всегда является решением.
Метод 1: Сведение к линейному (Подстановка) yα:
y−αy′=a(x)y1−α+b(x)
5. Сделаем замену: z=y1−α.
Тогда z′=(1−α)y−αy′.
6. Уравнение сводится к линейному относительно z: 1−αz′=a(x)z+b(x).
4. Разделим уравнение на
Метод 2: Подстановка Бернулли ( y=uv)
Ищем решение в виде произведения двух функций: y=u(x)v(x).
Тогда y′=u′v+uv′. Подставляем в уравнение:
u′v+uv′=a(x)uv+b(x)(uv)α
Сгруппируем слагаемые с u:
u′v+u(v′−a(x)v)=b(x)(uv)α
Алгоритм:
7. Приравниваем скобку к нулю: v′−a(x)v=0. Это уравнение с разделяющимися переменными. Находим одно любое частное (ненулевое) решение для v(x).
8. Подставляем найденное v(x) в оставшуюся часть: u′v=b(x)(uv)α. Интегрируем и находим u(x) с произвольной константой C.
9. Ответ: y=u(x)v(x).
Пример (Метод y=uv)
Решить уравнение: y′+xy=y2x2 (здесь α=2).
Собираем ответ y=uv:
y=−x(x2+C)2. Также решением является y=0.
ОДУ n-го порядка и Теорема Коши ^2-11-higher-order-ode
Основные понятия n-го порядка, разрешенное относительно старшей производной:
y(n)=f(x,y,y′,y′′,…,y(n−1))(1)
Уравнение
Общим решением называется функция y=φ(x,C1,C2,…,Cn), удовлетворяющая условиям:
13. Для ∀ набора констант C1,…,Cn функция является решением уравнения (1).
14. Для ∀ набора начальных условий (x0,y0,y0′,…,y0(n−1))∈G существует единственный набор констант C1,…,Cn, удовлетворяющий этим начальным условиям:
y(x0)=y0, y′(x0)=y0′,…,y(n−1)(x0)=y0(n−1).
Неявно заданное общее решение Φ(x,y,C1,…,Cn)=0 называется общим интегралом.
Частное решение — любое решение, получающееся из общего при конкретных значениях констант.
Типы задач для ОДУ n-го порядка
15. Найти общее решение.
16. Задача Коши (Начальная задача): Найти частное решение, удовлетворяющее n начальным условиям, заданным в одной точке x0.
17. Краевая задача: Найти частное решение, удовлетворяющее условиям, которые заданы на разных концах отрезка (например, часть условий в точке x0, а другая часть в точке x1).
Теорема Коши (О существовании и единственности решения) y(n)=φ(x,y,y′,…,y(n−1)).
Если функция φ в некоторой области D удовлетворяет условию Липшица по переменным y,y′,…,y(n−1):
φ(x,y~,y~′,…,y~(n−1))−φ(x,y,y′,…,y(n−1))≤L∑j=0n−1y~(j)−y(j)
То в этой области Dсуществует и единственно решение задачи Коши.
Дана задача Коши для уравнения:
Лекция №12.2.12-30.04.2026
LEGIT CHECK
Понижение порядка ОДУ ^2-12-lowering-order
Существуют специальные типы уравнений высших порядков, порядок которых можно понизить с помощью подходящей замены.
1. Уравнение вида y(n)=f(x)
Решается последовательным n-кратным интегрированием.
y(n−1)=∫f(x)dx+C1⇒y(n−2)=∫(∫f(x)dx)dx+C1x+C2⇒…
2. Уравнение не содержит явно искомую функцию y
Вид: F(x,y′,y′′)=0Замена:y′=p(x)⇒y′′=p′(x).
Уравнение сводится к 1-му порядку относительно функции p: F(x,p,p′)=0. Находим p(x), а затем y=∫p(x)dx+C.
3. Уравнение не содержит явно независимую переменную x
Вид: F(y,y′,y′′)=0Замена:y′=p(y) (теперь p — функция от y).
Тогда по правилу сложной функции: y′′=dydp⋅dxdy=py′⋅y′=p′p.
Уравнение сводится к виду: F~(y,p,p⋅p′)=0.
Пример yy′′+(y′)2=0
Делаем замену: y′=p(y),y′′=p⋅dydp.
y⋅p⋅dydp+p2=0
Выносим p: p(ydydp+p)=0.
4. Уравнение, однородное относительно y,y′,y′′
Это значит, что если заменить y→ky,y′→ky′,y′′→ky′′, то уравнение не изменится (коэффициент k сократится).
Замена:y′=y⋅z(x).
Тогда y′′=(yz)′=y′z+yz′=yz⋅z+yz′=y(z2+z′).
Пример (с доски) xyy′′−x(y′)2=yy′
Проверка на однородность: x(ky)(ky′′)−x(ky′)2=(ky)(ky′)⇒k2(xyy′′−x(y′)2)=k2(yy′). Однородное!
Подстановка y′=yz,y′′=y(z′+z2):
xy⋅y(z′+z2)−x(yz)2=y(yz)⇒xy2(z′+z2)−xy2z2=y2z
Разделим на y2=0:
x(z′+z2)−xz2=z⇒xz′+xz2−xz2=z⇒xz′=z
Разделяем переменные: xdxdz=z⇒zdz=xdx⇒ln∣z∣=ln∣x∣+lnC1⇒z=C1x.
Обратная замена: yy′=C1x⇒∫ydy=∫C1xdx⇒ln∣y∣=C12x2+C2.
Решить:
5. Уравнения в точных производных
Если обе части уравнения можно свернуть как производные каких-либо функций, уравнение можно сразу проинтегрировать.
Пример yy′′=(y′)2⇒y′y′′=yy′⇒(ln∣y′∣)′=(ln∣y∣)′
Интегрируем: ln∣y′∣=ln∣y∣+lnC1⇒y′=C1y.
Снова разделяем переменные: ydy=C1dx⇒ln∣y∣=C1x+lnC2⇒y=C2eC1x.
Линейное ОДУ n-го порядка и его свойства ^2-12-linear-ode-n
Линейным дифференциальным уравнением n-го порядка называется уравнение вида:
a0(x)y(n)+a1(x)y(n−1)+⋯+an−1(x)y′+an(x)y=f(x)(1)
где ak(x) и f(x) — известные функции от x.
Если f(x)≡0, то получаем соответствующее однородное уравнение:
a0(x)y(n)+a1(x)y(n−1)+⋯+an(x)y=0(2)
Замечание: Если a0(x)=0 на некотором отрезке, то уравнение можно разделить на a0(x), и для него выполняются условия теоремы Коши о существовании и единственности решения.
Оператор Ln действует из пространства Cn([a,b]) в C([a,b]) и обладает свойствами линейности:
Ln(y1+y2)=Ln(y1)+Ln(y2)
Ln(λy)=λLn(y)
Теоремы о свойствах решений (1) и (2)
Сумма решений однородного (2) есть решение однородного (2).Доказательство: Пусть L(y1)=0,L(y2)=0. Тогда L(y1+y2)=L(y1)+L(y2)=0+0=0.
Разность решений неоднородного (1) есть решение однородного (2).Доказательство: Пусть L(y1)=f(x),L(y2)=f(x). Тогда L(y1−y2)=L(y1)−L(y2)=f(x)−f(x)=0.
Сумма решения однородного (2) и неоднородного (1) есть решение неоднородного (1).Доказательство: Пусть L(y1)=0,L(y2)=f(x). Тогда L(y1+y2)=L(y1)+L(y2)=0+f(x)=f(x).
Теорема о структуре пространства решений ЛОДУ Множество всех решений линейного однородного уравнения (2) образует линейное подпространство в пространстве Cn([a,b]).
Доказательство
Для того чтобы множество было линейным пространством, оно должно быть замкнуто относительно сложения и умножения на скаляр:
Пусть y1 и y2 — решения (2). По доказанному выше свойству 1, их сумма y1+y2 также является решением (2).
Пусть y1 — решение (2), λ∈R. Тогда L(λy1)=λL(y1)=λ⋅0=0⇒λy1 также решение (2).
Существует нейтральный элемент: y≡0 (всегда является решением ЛОДУ).
Существует противоположный элемент: для решения y1 функция (−y1) также является решением, так как L(−y1)=−L(y1)=0.
Следовательно, множество решений (2) удовлетворяет аксиомам и образует линейное пространство.
Линейная зависимость и независимость функций ^2-12-linear-independence
Для изучения структуры решений уравнения n-го порядка вводится понятие линейной зависимости системы функций.
Определение y1(x),y2(x),…,yn(x), определенные на отрезке [a,b], называются ==линейно зависимыми==, если существуют такие константы λ1,λ2,…,λn∈R, не все равные нулю (т.е. λ12+λ22+⋯+λn2=0), что их линейная комбинация тождественно равна нулю на всем отрезке:
λ1y1(x)+λ2y2(x)+⋯+λnyn(x)≡0∀x∈[a,b]
Функции
Функции называются ==линейно независимыми==, если указанное тождество выполняется только в тривиальном случае, когда все коэффициенты равны нулю: λ1=λ2=⋯=λn=0.
Теорема (Критерий линейной зависимости) y1,…,yn линейно зависима на отрезке [a,b] тогда и только тогда, когда хотя бы одна из этих функций является линейной комбинацией остальных.
Система функций
Лекция №13.2.13-07.05.2026
LEGIT CHECK
Линейная зависимость функций и Определитель Вронского ^2-13-wronskian
Теорема (Критерий линейной зависимости) y1,y2,…,yn линейно зависимы ⟺ одна из них является линейной комбинацией остальных.
Функции
Доказательство y1,…,yn — линейно зависимы, если ∃λ1,…,λn∈R, где не все λi=0 (т.е. λ12+⋯+λn2=0), такие что:
λ1y1+λ2y2+⋯+λnyn=0
Пусть, не ограничивая общности, λ1=0. Тогда выразим y1:
y1=−λ1λ2y2−⋯−λ1λnyn
Обозначив −λ1λi=λ~i, получаем y1 как линейную комбинацию остальных.
По определению,
Определение - Определитель Вронского (Вронскиан) y1(x),y2(x),…,yn(x), имеющих непрерывные производные до (n−1)-го порядка включительно (yi∈C(n−1)([a,b])), Определителем Вронского называется функциональный определитель вида:
W[y1,y2,…,yn](x)=y1y1′y1′′…y1(n−1)y2y2′y2′′…y2(n−1)……………ynyn′yn′′…yn(n−1)=W(x)
Для системы функций
Теорема (О Вронскиане системы линейно зависимых функций) y1,…,yn линейно зависима на [a,b] (где yi∈C(n−1)([a,b])), то её Вронскиан тождественно равен нулю:
W[y1,…,yn](x)≡0∀x∈[a,b]
Если система функций
Доказательство y1=λ2y2+⋯+λnyn.
Тогда её производные:
y1′=λ2y2′+⋯+λnyn′…y1(n−1)=λ2y2(n−1)+⋯+λnyn(n−1)
Подставим это в первый столбец определителя Вронского W(x). Получится, что первый столбец является линейной комбинацией остальных столбцов. По свойствам определителей (если один столбец есть линейная комбинация других), такой определитель тождественно равен нулю: W(x)≡0.
Так как функции линейно зависимы, одна из них выражается через остальные (по предыдущей теореме). Пусть
Важное замечание (Контрпример) неверно! Если W(x)≡0, это ещё не гарантирует линейную зависимость произвольных функций.
Пример: Рассмотрим функции y1=x2 и y2=x∣x∣ на отрезке x∈[−1,1].
W[y1,y2](x)=x22xx∣x∣2∣x∣=x2⋅2∣x∣−2x⋅x∣x∣≡0
Вронскиан равен нулю всюду на [−1,1], однако функции y1 и y2линейно независимы на этом отрезке.
Связь Вронскиана и независимости жестко работает только для решений дифференциальных уравнений!
Обратное утверждение в общем случае
Линейная зависимость и независимость решений ЛОДУ n-го порядка ^2-13-lode-solutions
Рассмотрим линейное однородное дифференциальное уравнение (ЛОДУ) n-го порядка:
a0(x)y(n)+a1(x)y(n−1)+⋯+an(x)y=0(1)
С условиями регулярности (3): ∀i=0,n⟹ai(x)∈C([a,b]) и a0(x)=0∀x∈[a,b].
Теорема (Критерий линейной зависимости решений ЛОДУ) y1,…,yn ЛОДУ (1) при условиях (3) были линейно зависимы, необходимо и достаточно, чтобы их определитель Вронского обращался в нуль хотя бы в одной точке x0∈[a,b]:
∃x0∈[a,b]:W[y1,…,yn](x0)=0
Для того чтобы решения
Доказательство Необходимость (⇒):
Пусть y1,…,yn — линейно зависимы. По доказанной ранее теореме, их Вронскиан тождественно равен нулю: W(x)≡0⟹W(x0)=0.
Достаточность (⇐):
Пусть ∃x0∈[a,b], в которой W(x0)=0.
Вронскиан в точке x0 — это определитель числовой матрицы. Равенство его нулю означает, что столбцы этой матрицы линейно зависимы. То есть существует нетривиальный набор констант C1,…,Cn (где C12+⋯+Cn2=0), такой что:
C1y1(x0)y1′(x0)…y1(n−1)(x0)+⋯+Cnyn(x0)yn′(x0)…yn(n−1)(x0)=00…0
Составим функцию y~(x)=C1y1(x)+⋯+Cnyn(x).
Как линейная комбинация решений ЛОДУ, y~(x) также является решением уравнения (1).
Проверим начальные условия в точке x0 для функции y~(x):
Из векторного равенства выше следует, что y~(x0)=0,y~′(x0)=0,…,y~(n−1)(x0)=0(∗).
Заметим, что тривиальная функция y(x)≡0 также удовлетворяет уравнению (1) и нулевым начальным условиям (∗).
Так как условия (3) обеспечивают выполнение теоремы Коши (существование и единственность), то задача Коши с нулевыми условиями имеет единственное решение.
Следовательно, наша функция y~(x) обязана тождественно совпадать с нулём:
y~(x)≡0⟹C1y1(x)+⋯+Cnyn(x)≡0.
Так как не все Ci равны нулю, по определению это означает, что функции y1,…,ynлинейно зависимы.
Если Вронскиан решений ЛОДУ (1) обращается в нуль хотя бы в одной точке, то он равен нулю тождественно на всем отрезке.
Сводная теорема:
Пусть y1,…,yn — решения ЛОДУ (1), выполняются условия регулярности (3). Тогда:
Решения y1,…,ynлинейно зависимы⟺W[y1,…,yn](x)≡0.
Решения y1,…,ynлинейно независимы⟺W[y1,…,yn](x)=0∀x∈[a,b].
Структура общего решения ЛОДУ n-го порядка. ФСР ^2-13-fss-structure
Определение n линейно независимых решений ЛОДУ n-го порядка называется ==фундаментальной системой решений (ФСР)==.
Система из
Теорема о размерности пространства решений Размерность пространства решений ЛОДУ n-го порядка в точности равна n.
Доказательство (Построение базиса) n линейно независимых решений (базис), через которые выражается любое другое решение.
Нам нужно доказать, что существует ровно
Выберем произвольную точку x0∈[a,b]. Зададим n специальных наборов начальных условий так, чтобы они образовали единичную матрицу:
y1(x0)=1,y1′(x0)=0,…,y1(n−1)(x0)=0y2(x0)=0,y2′(x0)=1,…,y2(n−1)(x0)=0…yn(x0)=0,yn′(x0)=0,…,yn(n−1)(x0)=1
По теореме Коши, для каждого из этих n наборов существует единственное решение yi(x) уравнения (1).
Составим Вронскиан для этих решений в точке x0:
W[y1,…,yn](x0)=10…001…0…………00…1=1=0
Так как Вронскиан не равен нулю, эти n решений линейно независимы.
Покажем, что любое решение y(x) выражается через них. Пусть y(x) — произвольное решение с какими-то начальными условиями: y(x0)=C1,y′(x0)=C2,…,y(n−1)(x0)=Cn.
Сконструируем функцию: y~(x)=C1y1(x)+C2y2(x)+⋯+Cnyn(x).
Она тоже является решением, и её начальные условия в точке x0 (из-за единичной матрицы) будут в точности равны C1,C2,…,Cn.
По теореме единственности Коши, так как начальные условия совпадают, функции тождественно равны: y(x)≡y~(x).
Таким образом, y1,…,yn образуют базис пространства решений. Размерность равна n.
Лекция №14.2.14-14.05.2026
LEGIT CHECK
Теорема о структуре общего решения ЛОДУ n-го порядка ^2-14-lode-structure
Теорема ai(x) непрерывны, a0(x)=0).
Тогда общее решение ЛОДУ имеет вид:
yoo(x)=C1y1(x)+C2y2(x)+⋯+Cnyn(x)
где y1,y2,…,yn — фундаментальная система решений (ФСР), то есть система линейно независимых частных решений этого уравнения, а C1,…,Cn — произвольные постоянные.
Пусть для линейного однородного дифференциального уравнения (ЛОДУ) выполняются условия существования и единственности (коэффициенты
Доказательство
Функция yoo(x) является решением ЛОДУ, так как любая линейная комбинация решений однородного уравнения также является его решением (по свойствам линейного оператора L(y)=0).
Покажем, что из этого решения можно получить решение любой задачи Коши. Зададим произвольные начальные условия в точке x0∈[a,b]:
y(x0)=y0y′(x0)=y0′…y(n−1)(x0)=y0(n−1)
Подставим нашу конструкцию yoo в эти условия, чтобы найти неизвестные константы C1,…,Cn. Получим систему линейных алгебраических уравнений (СЛАУ):
⎩⎨⎧C1y1(x0)+C2y2(x0)+⋯+Cnyn(x0)=y0C1y1′(x0)+C2y2′(x0)+⋯+Cnyn′(x0)=y0′…C1y1(n−1)(x0)+C2y2(n−1)(x0)+⋯+Cnyn(n−1)(x0)=y0(n−1)
Определитель этой СЛАУ относительно неизвестных Ci — это в точности определитель ВронскогоW(x0), построенный на функциях y1,…,yn в точке x0.
Так как y1,…,yn образуют ФСР (они линейно независимы), то их Вронскиан W(x0)=0.
По теореме Крамера, если определитель системы отличен от нуля, то СЛАУ имеет единственное решениеC~1,…,C~n.
Функция y~(x)=C~1y1(x)+⋯+C~nyn(x) удовлетворяет уравнению и заданным начальным условиям. По теореме единственности Коши, она совпадает с искомым решением. Ч.т.д.
Теорема о структуре общего решения ЛНДУ ^2-14-lnde-structure
Теорема L(y)=f(x) равно сумме общего решения соответствующего однородного уравнения ЛОДУ L(y)=0 и любого частного решения неоднородного уравнения.
yон(x)=yoo(x)+yчн(x)
Общее решение линейного неоднородного дифференциального уравнения (ЛНДУ)
Доказательство yoo+yчн является решением ЛНДУ.
Пользуясь линейностью оператора: L(yoo+yчн)=L(yoo)+L(yчн).
Так как yoo — решение ЛОДУ, то L(yoo)=0. Так как yчн — решение ЛНДУ, то L(yчн)=f(x).
Итог: 0+f(x)=f(x). Уравнение удовлетворяется.
9. Теперь нужно показать, что любое решение ЛНДУ может быть найдено в таком виде.
Пусть y(x) — произвольное решение ЛНДУ с какими-то заданными начальными условиями: y(x0)=y0,y′(x0)=y0′,…
Нам нужно доказать, что найдутся такие константы в yoo, что yoo(x0)+yчн(x0)=y0.
Перепишем: yoo(x0)=y0−yчн(x0).
Аналогично для производных: yoo′(x0)=y0′−yчн′(x0) и так далее.
Так как yoo — это общее решение ЛОДУ, мы уже доказали в предыдущей теореме, что оно может удовлетворить абсолютно любым начальным условиям (так как Вронскиан не равен нулю). Значит, мы всегда сможем подобрать нужные константы. Ч.т.д.
8. Сначала докажем, что сумма
Формула Остроградского-Лиувилля (для уравнения 2-го порядка) ^2-14-ostrogradsky-liouville
Рассмотрим ЛОДУ 2-го порядка, приведенное к стандартному виду (коэффициент при y′′ равен 1):
y′′+p1(x)y′+p2(x)y=0(9)
где p1(x),p2(x)∈C([a,b]).
Теорема y1(x) и y2(x) — два решения уравнения (9), то их Вронскиан вычисляется по формуле Остроградского-Лиувилля:
W(x)=W(x0)⋅e−∫x0xp1(t)dt
где x0∈[a,b] — произвольная точка.
(Из этой формулы напрямую видно: если W(x0)=0, то экспонента никогда не равна нулю, значит W(x)=0 нигде на отрезке. И наоборот).
Если
Доказательство y1 и y2:
10) y1′′+p1(x)y1′+p2(x)y1=0⋅(−y2)
11) y2′′+p1(x)y2′+p2(x)y2=0⋅(y1)
Запишем тождества для решений
Сложим полученные уравнения. Слагаемые с p2(x) взаимно уничтожатся (−p2y1y2+p2y1y2=0):
(y1y2′′−y2y1′′)+p1(x)(y1y2′−y2y1′)=0
Вспомним определение Вронскиана для двух функций: W(x)=y1y1′y2y2′=y1y2′−y2y1′.
Найдем производную Вронскиана:
W′(x)=(y1y2′−y2y1′)′=(y1′y2′+y1y2′′)−(y2′y1′+y2y1′′)=y1y2′′−y2y1′′.
Замечаем, что наше уравнение — это просто дифференциальное уравнение относительно Вронскиана:
W′(x)+p1(x)W(x)=0
Разделяем переменные: dxdW=−p1(x)W⟹WdW=−p1(x)dx.
Интегрируем от x0 до x:
∫W(x0)W(x)WdW=−∫x0xp1(t)dt⟹ln∣W(x)∣−ln∣W(x0)∣=−∫x0xp1(t)dt
Потенцируем и получаем искомую формулу:
W(x)=W(x0)⋅e−∫x0xp1(t)dt
ЛОДУ с постоянными коэффициентами (2-го порядка) ^2-14-lode-constant-coeff
Уравнение имеет вид:
y′′+py′+qy=0(1)
где p,q∈R — обычные числа.
Метод Эйлера: Будем искать решение в виде показательной функции y=eλx, где λ — некоторое число (возможно, комплексное).
Найдем производные: y′=λeλx, y′′=λ2eλx.
Подставим в уравнение (1):
λ2eλx+pλeλx+qeλx=0
Так как eλx=0, сокращаем на него и получаем алгебраическое ==характеристическое уравнение==:
λ2+pλ+q=0(2)
Корни этого квадратного уравнения определяют вид общего решения. Возможны 3 случая.
Случай 1. Корни действительные и различные ( D>0)
Пусть λ1=λ2∈R.
Тогда частные решения: y1=eλ1x и y2=eλ2x.
Убедимся, что они образуют ФСР (линейно независимы), вычислив их Вронскиан:
W(x)=eλ1xλ1eλ1xeλ2xλ2eλ2x=λ2e(λ1+λ2)x−λ1e(λ1+λ2)x=e(λ1+λ2)x(λ2−λ1)
Так как экспонента не равна нулю, а λ1=λ2, то W(x)=0. Значит, функции линейно независимы.
Общее решение:yoo=C1eλ1x+C2eλ2x
Случай 2. Корни действительные и кратные ( D=0)
Пусть λ1=λ2∈R.
Одно решение у нас есть: y1=eλ1x. Но для ФСР нужно второе, линейно независимое.
Применим метод вариации. Будем искать второе решение в виде: y2=u(x)eλ1x.
Найдем производные:
y2′=u′eλ1x+λ1ueλ1xy2′′=u′′eλ1x+2λ1u′eλ1x+λ12ueλ1x(Продолжение вывода на следующей лекции, спойлер: u(x) окажется равным x, и второе решение будет y2=xeλ1x).
Лекция №15.2.15-21.05.2026
LEGIT CHECK
Принцип суперпозиции (Теорема о наложении частных решений) ^2-15-superposition
Рассмотрим линейное неоднородное дифференциальное уравнение (ЛНДУ) n-го порядка:
y(n)+a1(x)y(n−1)+⋯+an−1(x)y′+an(x)y=f(x)(1)
Введём линейный дифференциальный оператор Ln(y). Тогда уравнение запишется как Ln(y)=f(x).
Теорема о наложении частных решений f(x)=f1(x)+f2(x).
Если y1(x) — частное решение уравнения Ln(y)=f1(x), а y2(x) — частное решение уравнения Ln(y)=f2(x), то функция:
y(x)=y1(x)+y2(x)
является частным решением исходного уравнения Ln(y)=f1(x)+f2(x).
Пусть правая часть уравнения представляет собой сумму двух функций:
Доказательство y1(x)+y2(x) в левую часть уравнения (1). По свойствам производной суммы, (y1+y2)(k)=y1(k)+y2(k).
Сгруппируем слагаемые, относящиеся к y1 и y2:
(y1(n)+y2(n))+a1(x)(y1(n−1)+y2(n−1))+⋯+an(x)(y1+y2)==[y1(n)+a1(x)y1(n−1)+⋯+an(x)y1]+[y2(n)+a1(x)y2(n−1)+⋯+an(x)y2]
Первая квадратная скобка — это результат подстановки решения y1 в левую часть, по условию она равна f1(x).
Вторая квадратная скобка — это результат подстановки y2, по условию она равна f2(x).
Следовательно, вся сумма равна f1(x)+f2(x).
Тождество выполняется, значит y1(x)+y2(x) является решением. Ч.т.д.
Подставим функцию
Нахождение частных решений ЛНДУ с постоянными коэффициентами (Специальная правая часть) ^2-15-special-rhs-1
Рассмотрим ЛНДУ n-го порядка с постоянными коэффициентами:
y(n)+a1y(n−1)+⋯+an−1y′+any=f(x)
В общем случае частное решение ищется методом Лагранжа. Однако, если правая часть f(x) имеет специфический («квазиполиномиальный») вид, частное решение yчн можно найти проще — методом неопределенных коэффициентов, заранее угадывая его структуру по корням характеристического уравнения.
Характеристическое уравнение для левой части:
λn+a1λn−1+⋯+an=0
Пусть λ1,λ2,… — корни этого уравнения.
Тип 1: Экспонента умноженная на многочлен f(x)=Pn(x)eαx
где Pn(x) — многочлен степени n, α∈R — заданное число.
Правая часть имеет вид:
Структура частного решения yчн зависит от того, совпадает ли число α с корнями характеристического уравнения:
Контрольное число α НЕ является корнем характеристического уравнения (α=λi):
Частное решение ищется в виде:
yчн=Qn(x)eαx
где Qn(x) — многочлен той же степениn с неизвестными коэффициентами.
(Например, если Pn(x)=2x+1 (степень 1), то Qn(x)=Ax+B).
Контрольное число α ЯВЛЯЕТСЯ корнем характеристического уравнения кратности k:(То есть корень α встречается среди решений характеристического уравнения k раз).
Возникает так называемый “резонанс”. Частное решение должно быть домножено на xk:
yчн=xkQn(x)eαx
Алгоритм нахождения коэффициентов для Qn(x):
Выписав вид yчн, мы находим его производные yчн′,yчн′′ и т.д.
Подставляем их в исходное дифференциальное уравнение, сокращаем экспоненту eαx и приравниваем коэффициенты при одинаковых степенях x в левой и правой частях. Получаем СЛАУ и находим коэффициенты.
Нахождение частных решений ЛНДУ (Специальная правая часть — Тригонометрия) ^2-15-special-rhs-2
Тип 2: Экспонента умноженная на тригонометрию и многочлены f(x)=eαx[Pn1(x)cos(βx)+Pn2(x)sin(βx)]
где Pn1(x) и Pn2(x) — многочлены степеней n1 и n2 соответственно, α,β∈R.
Правая часть уравнения имеет более сложный вид (содержит синусы и косинусы):
Составим контрольное комплексное число: z=α±iβ.
Обозначим максимальную из степеней многочленов как m=max(n1,n2).
Структура частного решения yчн строится аналогично первому типу, опираясь на корни характеристического уравнения λi:
Контрольное число z=α±iβ НЕ является корнем характеристического уравнения:
Частное решение ищется в полном виде (обязательно присутствуют и синус, и косинус, даже если в правой части был только один из них!):
yчн=eαx[Q~m(x)cos(βx)+R~m(x)sin(βx)]
где Q~m(x) и R~m(x) — полные многочлены степени m с неизвестными коэффициентами.
Контрольное число z=α±iβ ЯВЛЯЕТСЯ корнем характеристического уравнения кратности k:
Возникает резонанс. Вся конструкция домножается на xk:
yчн=xkeαx[Q~m(x)cos(βx)+R~m(x)sin(βx)]
Пример подбора структуры y′′+y=cosx.
Дано уравнение:
Характеристическое уравнение: λ2+1=0⟹λ1,2=±i.
Правая часть: f(x)=cosx. Здесь α=0,β=1. Многочлен P0(x)=1 (степень m=0).
Контрольное число: z=0±1⋅i=±i.
Сравниваем: контрольное число совпадает с корнем характеристического уравнения (±i). Кратность корня k=1.
Структура частного решения (с домножением на x1 и полными многочленами нулевой степени, т.е. константами A и B):
yчн=x⋅e0⋅x[Acosx+Bsinx]=x(Acosx+Bsinx).
Метод вариации произвольных постоянных (Метод Лагранжа) для ОДУ n-го порядка ^2-15-lagrange-method
Если правая часть f(x) не относится к специальным видам (например, содержит тангенс, дроби или логарифмы), метод неопределенных коэффициентов не работает. Применяется универсальный метод Лагранжа.
Дано ЛНДУ n-го порядка (приведенное к стандартному виду, где коэффициент при старшей производной равен 1):
y(n)+a1(x)y(n−1)+⋯+an(x)y=f(x)(1)
Алгоритм Лагранжа Шаг 1. Зануляем правую часть и решаем соответствующее однородное уравнение (ЛОДУ).
Находим фундаментальную систему решений (ФСР): y1(x),y2(x),…,yn(x).
Записываем общее решение ЛОДУ:
yоо=C1y1+C2y2+⋯+Cnyn
Шаг 2. Ищем решение исходного ЛНДУ (1), заменяя константы Ci на неизвестные функции от x:
y(x)=C1(x)y1(x)+C2(x)y2(x)+⋯+Cn(x)yn(x)
Шаг 3. Составляем систему алгебраических уравнений относительно производных этих неизвестных функций C1′(x),C2′(x),…,Cn′(x).
Система выглядит так:
C'_1 y_1 + C'_2 y_2 + \dots + C'_n y_n = 0 \\
C'_1 y'_1 + C'_2 y'_2 + \dots + C'_n y'_n = 0 \\
C'_1 y''_1 + C'_2 y''_2 + \dots + C'_n y''_n = 0 \\
\dots \\
C'_1 y_1^{(n-2)} + C'_2 y_2^{(n-2)} + \dots + C'_n y_n^{(n-2)} = 0 \\
C'_1 y_1^{(n-1)} + C'_2 y_2^{(n-1)} + \dots + C'_n y_n^{(n-1)} = f(x)
\end{cases} \quad (*) $$
*(Обрати внимание: правые части всех уравнений, кроме последнего, равны нулю. В последнем уравнении со старшими производными справа стоит функция $f(x)$).*
**Шаг 4.** Решаем систему $(*)$ как систему линейных алгебраических уравнений относительно переменных $C'_1, \dots, C'_n$ (например, по правилу Крамера).
**Шаг 5.** Интегрируем найденные производные, получая функции с новыми константами:
$C_1(x) = \int C'_1(x)dx + \tilde{C}_1$
$\dots$
$C_n(x) = \int C'_n(x)dx + \tilde{C}_n$
**Шаг 6.** Подставляем найденные функции в исходную замену и получаем итоговое общее решение ЛНДУ.
Теорема о разрешимости системы Лагранжа (∗)всегда имеет и притом единственное решение относительно неизвестных Ci′(x).
Система
Доказательство (∗) — это в точности определитель Вронского Δ=W[y1,y2,…,yn](x), построенный на функциях ФСР y1,…,yn.
Так как функции y1,…,yn по определению образуют фундаментальную систему решений (то есть они линейно независимы), то их определитель Вронского не обращается в ноль ни в одной точке отрезка: W(x)=0.
Согласно теореме Крамера из линейной алгебры, если главный определитель СЛАУ не равен нулю, система имеет единственное решение. Ч.т.д.
Определитель основной матрицы системы
Лекция №16.2.16-28.05.2026
LEGIT CHECK
Системы дифференциальных уравнений. Нормальная форма и Задача Коши ^2-16-systems-intro
Основные понятия t (часто имеет смысл времени) и n неизвестных функций от этой переменной: x1(t),x2(t),…,xn(t).
Система дифференциальных уравнений в общем виде связывает переменную t, неизвестные функции и их производные:
⎩⎨⎧F1(t,x1,…,x1(m1),…,xn,…,xn(mn))=0…Fk(t,x1,…,x1(m1),…,xn,…,xn(mn))=0
Порядком системы называется сумма порядков старших производных каждой неизвестной функции: m1+m2+⋯+mn.
Пусть задана независимая переменная
Нормальная система ДУ n уравнений 1-го порядка, разрешенных относительно первых производных неизвестных функций, она называется нормальной системой:
⎩⎨⎧dtdx1=f1(t,x1,x2,…,xn)dtdx2=f2(t,x1,x2,…,xn)…dtdxn=fn(t,x1,x2,…,xn)
Если система состоит из
Векторно-матричная форма записи Xˉ(t)=x1(t)x2(t)…xn(t),fˉ(t,Xˉ)=f1(t,x1,…,xn)f2(t,x1,…,xn)…fn(t,x1,…,xn)
Тогда нормальная система компактно записывается в виде одного векторного уравнения:
Xˉ′=fˉ(t,Xˉ)(1)
Введем вектор-столбец неизвестных функций и вектор-столбец правых частей:
Функция Xˉ(t,Cˉ), где Cˉ=(C1,…,Cn)T — вектор произвольных констант, называется общим решением системы (1), если:
При любом Cˉ функция Xˉ=Xˉ(t,Cˉ) является решением (1).
Для любых начальных условий (t0,Xˉ0) существует единственный вектор констант Cˉ0, такой что Xˉ0=Xˉ(t0,Cˉ0).
Задача Коши и Теорема существования Задача Коши: Задана точка (начальные условия) t=t0, x1(t0)=x10,…,xn(t0)=xn0, или в векторном виде Xˉ(t0)=Xˉ0. Требуется найти определенное решение системы.
Теорема Коши: Пусть вектор-функция fˉ(t,Xˉ) определена в области G⊂Rn+1, непрерывна по совокупности переменных и имеет непрерывные частные производные по всем xi. Тогда задача Коши имеет единственное решение.
Связь между нормальной системой и ОДУ n-го порядка ^2-16-equivalence
Теорема об эквивалентности n-го порядка эквивалентна некоторому одному дифференциальному уравнению n-го порядка. Любое ОДУ n-го порядка можно свести к нормальной системе из n уравнений 1-го порядка, и наоборот.
Нормальная система
Вывод (сведение системы к одному уравнению) ⎩⎨⎧x1′=f1(t,x1,…,xn)…xn′=fn(t,x1,…,xn)
Возьмем первое уравнение и найдем его производную по t, применяя правило дифференцирования сложной функции (так как каждое xi зависит от t):
dt2d2x1=∂t∂f1+∂x1∂f1dtdx1+∂x2∂f1dtdx2+⋯+∂xn∂f1dtdxn
Заменим все dtdxi на правые части fi из исходной системы. Получим выражение, зависящее только от t и самих функций x1,…,xn:
dt2d2x1=F2(t,x1,…,xn)
Продифференцируем еще раз аналогичным образом:
dt3d3x1=∂t∂F2+∑i=1n∂xi∂F2fi⟹dt3d3x1=F3(t,x1,…,xn)
Повторяя этот процесс n−1 раз, мы получим систему уравнений для производных функции x1:
x1′=f1,x1′′=F2,…x1(n−1)=Fn−1
Из этих n−1 уравнений можно выразить все функции x2,…,xn через t,x1,x1′,…,x1(n−1).
Наконец, найдем n-ю производную:
dtndnx1=Fn(t,x1,…,xn)
Подставив в нее найденные выражения для x2,…,xn, мы получим одно дифференциальное уравнение n-го порядка относительно функции x1:
x1(n)=Φ(t,x1,x1′,…,x1(n−1))
Дана система:
Нормальные системы линейных ДУ и свойства решений ^2-16-linear-systems
Определение линейной, если неизвестные функции xi входят в правые части в первой степени.
Векторная форма записи неоднородной линейной системы:
dtdXˉ=A(t)Xˉ+Bˉ(t)(1)
Если вектор Bˉ(t)≡0, то система называется однородной:
dtdXˉ=A(t)Xˉ(2)(Замечание: Если элементы матрицы A(t) и вектор Bˉ(t) непрерывны на отрезке [a,b], то выполняются условия теоремы Коши, и задача Коши имеет единственное решение на всем отрезке).
Нормальная система ДУ называется
Теоремы о свойствах решений
Если Xˉ1 и Xˉ2 — решения однородной системы (2), то их линейная комбинация λ1Xˉ1+λ2Xˉ2 также является решением однородной системы (2).
Разность двух решений Xˉ1−Xˉ2 неоднородной системы (1) является решением соответствующей однородной системы (2).
Сумма решения однородной системы (2) и решения неоднородной системы (1) является решением неоднородной системы (1).
Определитель Вронского и структура общего решения системы ^2-16-wronskian-system
Линейная зависимость вектор-функций Xˉ1(t),…,Xˉn(t) называются линейно зависимыми на [a,b], если существуют константы λ1,…,λn∈R (где λ12+⋯+λn2=0), такие что:
λ1Xˉ1(t)+⋯+λnXˉn(t)≡0ˉ∀t∈[a,b]
В противном случае они линейно независимы.
Вектор-функции
Определитель Вронского для системы n вектор-функций Xˉ1,…,Xˉn называется определитель матрицы, составленной из столбцов этих векторов:
W[Xˉ1,…,Xˉn](t)=x11x21…xn1x12x22…xn2…………x1nx2n…xnn=detX(t)
Вронскианом системы из
Теорема: Если Xˉ1,…,Xˉn линейно зависимы, то W(t)≡0.
Теорема (Критерий линейной независимости решений системы) Xˉ1,…,Xˉn линейной однородной системы были линейно независимыми, необходимо и достаточно, чтобы их определитель Вронского не был равен нулю:
W[Xˉ1,…,Xˉn](t)=0∀t∈[a,b]Следствие: Равенство определителя Вронского нулю хотя бы в одной точке для решений ЛОС является критерием их линейной зависимости.
Для того чтобы решения
Структура общего решения n линейно независимых решений однородной системы Xˉ1,…,Xˉn представляют собой базис пространства решений и называются Фундаментальной системой решений (ФСР).
Любые
Общее решение однородной системы (2):Xˉoo(t)=C1Xˉ1(t)+C2Xˉ2(t)+⋯+CnXˉn(t)
Общее решение неоднородной системы (1):
Равно сумме общего решения однородной системы и любого частного решения неоднородной:
Xˉон(t)=Xˉoo(t)+Xˉчн(t)
Нормальные системы линейных ДУ с постоянными коэффициентами (Матричный метод Эйлера) ^2-16-constant-coeff-systems
Рассмотрим линейную однородную систему, где матрица коэффициентов A состоит из постоянных чисел:
dtdXˉ=AXˉ(5)
Будем искать частное решение системы в виде:
Xˉ(t)=eλt⋅Vˉ
где λ — некоторое число (возможно, комплексное), а Vˉ=(v1,…,vn)T — ненулевой вектор-столбец констант.
Подставим эту конструкцию в систему (5). Производная: Xˉ′=λeλtVˉ.
λeλtVˉ=A(eλtVˉ)
Так как eλt=0, сократим на него и перенесем всё в одну сторону (где E — единичная матрица):
(A−λE)Vˉ=0ˉ
Это классическая задача линейной алгебры!
Чтобы однородная СЛАУ имела нетривиальное (ненулевое) решение Vˉ, её определитель должен быть равен нулю. Мы получаем характеристическое уравнение матрицы:
det(A−λE)=0
Числа λi, являющиеся корнями этого уравнения, называются собственными значениями матрицы A. Векторы Vˉi, соответствующие этим числам, называются собственными векторами.
Построение ФСР в зависимости от корней λСлучай 1. Корни действительные и различные
Пусть λ1,…,λn∈R и λi=λj.
Каждому λi соответствует свой собственный вектор Vˉi.
Они образуют ФСР:
Xˉ1=eλ1tVˉ1,Xˉ2=eλ2tVˉ2,…Xˉn=eλntVˉnОбщее решение:Xˉoo=C1eλ1tVˉ1+⋯+CneλntVˉn
Случай 2. Комплексно-сопряженные корни
Пусть λ1,2=α±iβ — пара комплексных корней.
Им соответствует пара комплексно-сопряженных собственных векторов Vˉ1,2=Uˉ±iWˉ.
Подставляя это в экспоненту и применяя формулу Эйлера (eiβt=cosβt+isinβt), мы разделяем комплексное решение на действительную и мнимую части.
Эти две части дают два независимых действительных решения ФСР:
Xˉ~1=eαt(Uˉcosβt−Wˉsinβt)Xˉ~2=eαt(Uˉsinβt+Wˉcosβt)
Случай 3. Кратные корни
Если корень λ имеет кратность k, то решение для этого корня ищется в виде вектор-многочлена степени k−1:
Xˉ=eλt(Bˉ0+Bˉ1t+⋯+Bˉk−1tk−1)
Векторы коэффициентов Bˉj находятся методом неопределенных коэффициентов при подстановке в исходную систему (либо методом присоединенных векторов).
Пример (Решение системы 2x2, разобранное на доске) Xˉ′=AXˉ,гдеA=(1221)