Физические основы механики
1. Перемещение, скорость, ускорение материальной точки и связь между ними. Тангенциальное (касательное) и нормальное ускорение.
Вектор перемещения за интервал времени — вектор, равный векторной разности радиус-векторов:
Скорость - векторная величина, характеризующуая быстроту перемещения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта.
Мгновенная скорость — вектор, являющийся пределом скорости перемещения при стремлении к нулю (первая производная от радиус-вектора по времени). Вектор скорости всегда лежит на касательной к траектории:
Ускорение — вектор, равный мгновенному изменению вектора скорости (производная скорости по времени):
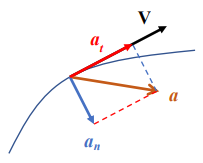
Связь и компоненты ускорения: Вектор полного ускорения представляется в виде суммы двух векторов: .
Тангенциальное (касательное) ускорение — определяет изменение модуля вектора скорости. Направлено по касательной к траектории (параллельно скорости): .
Нормальное (перпендикулярное) ускорение — отвечает за изменение направления вектора скорости. Направлено перпендикулярно скорости к центру кривизны траектории: .
Вывод компонент ускорения Введем единичный вектор для направления скорости . Он направлен по касательной в ту же сторону, что и скорость. Тогда вектор скорости: . Берем производную по времени: Первое слагаемое параллельно скорости — это тангенциальное ускорение . Второе слагаемое перпендикулярно скорости, так как длина единичного вектора не меняется, и его производная ортогональна самому вектору. Это нормальное ускорение .
Вывод величины нормального ускорения: Если точка движется по окружности с постоянной по величине скоростью , то за малое время она пройдет путь , где — малый угол поворота радиус-вектора. Так как вектор скорости перпендикулярен радиусу, он повернется на такой же угол, и величина изменения скорости составит . Подставляя , получаем: .
2. Векторы угловой скорости и углового ускорения твёрдого тела при вращательном движении. Их связь с линейными величинами. Период и частота вращения.
Угловая скорость — характеризует быстроту изменения угловой координаты : (единица измерения 1/с или рад/с). Угловое ускорение — характеризует быстроту изменения угловой скорости: (единица измерения 1/с).
Векторная форма: Вектор малого поворота направлен вдоль оси вращения по правилу правого винта. Тогда вектор угловой скорости определяется как:
Связь с линейными величинами:
- Вектор линейной скорости равен векторному произведению угловой скорости на радиус-вектор: .
- Модуль линейной скорости: (где — радиус окружности).
- Тангенциальное ускорение: .
- Нормальное ускорение: .
Период и частота (при постоянной скорости ):
Период — время одного полного оборота ( радиан): .
Частота вращения — количество оборотов в секунду (Гц): . Отсюда .
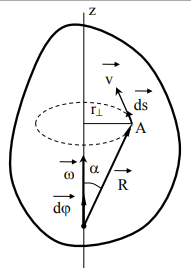
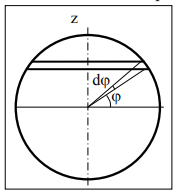
Векторная форма записи угловой скорости Рассмотрим поворот твердого тела на малый угол вокруг оси . Некоторая точка , находящаяся на расстоянии от оси, переместится на малый вектор , направленный по касательной к окружности: . Если задать положение точки радиус-вектором из начала координат на оси вращения, то , где — угол между и осью .
Тогда . Задавая вектор поворота вдоль оси вращения по правилу буравчика, получаем векторное равенство: Разделив на , получаем связь векторов: . Направление вектора и направление вращения жестко связаны правилом правого винта.
3. I, II и III законы Ньютона. Сила упругости (закон Гука), сила тяжести (закон всемирного тяготения), сила трения скольжения и сила сопротивления среды.
I закон Ньютона: Существуют такие системы отсчета, в которых материальная точка либо покоится, либо движется по прямой линии с постоянной скоростью, если на нее не действуют силы или их сумма равна нулю. (Такие системы называются инерциальными — ИСО). II закон Ньютона: В ИСО вектор ускорения материальной точки сонаправлен с вектором суммы сил. Величина ускорения прямо пропорциональна равнодействующей всех сил и обратно пропорциональна массе: . (Или в импульсном виде: ). III закон Ньютона: Две материальные точки действуют друг на друга с силами, одинаковыми по величине, одной природы, противоположными по направлению и лежащими на одной прямой: .
Основные силы в механике:
Сила всемирного тяготения: (где — гравитационная постоянная).
Сила тяжести: Действует вблизи поверхности планет. , где — ускорение свободного падения.
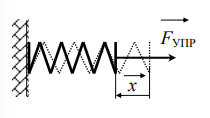
Сила упругости (Закон Гука): Возникает при малой деформации, пропорциональна её величине и направлена противоположно: ( — жесткость).
Сила (сухого) трения скольжения: Направлена против относительного движения, не зависит от площади контакта: ( — коэффициент трения, — сила нормальной реакции).
Сила сопротивления среды (жидкости/газа): Всегда направлена против скорости тела. Выражается как . При малых скоростях , и сила принимает вид .
Обобщенный закон Гука Рассмотрим деформируемый стержень с площадью сечения и начальной длиной . При деформации на возникает сила .
Введем понятие нормального напряжения в сечении: (измеряется в Паскалях). Относительная деформация: . Если переписать силу упругости через эти величины, получим: . Отсюда следует, что . Коэффициент называется модулем Юнга. Обобщенный закон Гука гласит: напряжение и относительная деформация прямо пропорциональны друг другу: .
4. Импульс тела. Импульс силы. Механическая система. Центр масс. Уравнение изменения импульса механической системы. Закон сохранения импульса.
Импульс тела (материальной точки) — вектор , направленный по касательной к траектории. Импульс силы — величина, равная интегралу от силы по времени: . Она равна изменению вектора импульса системы за этот интервал: .
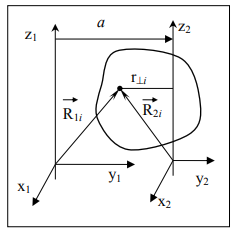
Механическая система — совокупность материальных точек. Силы, действующие между точками системы, называются внутренними, а со стороны тел вне системы — внешними. Центр масс системы — точка, радиус-вектор которой определяется как (где — суммарная масса). Импульс этой точки равен суммарному импульсу всей системы: .
Уравнение изменения импульса механической системы: Производная от импульса центра масс системы равна векторной сумме только внешних сил:
Закон сохранения импульса: Если равнодействующая всех внешних сил, действующих на систему, равна нулю (), то вектор суммарного импульса системы сохраняется (система называется замкнутой):
Динамика центра масс системы Рассмотрим систему из двух материальных точек. Запишем для каждой второй закон Ньютона:
Сложим эти уравнения. По третьему закону Ньютона внутренние силы взаимно компенсируются (). Останется только векторная сумма внешних сил :
Введя радиус-вектор центра масс и дважды продифференцировав его по времени, получим выражение для ускорения центра масс: . Отсюда получаем уравнение движения: . То есть центр масс движется так, как если бы в нем была сосредоточена вся масса системы, а все внешние силы были бы приложены к нему одному. Внутренние силы никак не могут изменить суммарный импульс системы.
5. Момент инерции твердого тела относительно оси. Момент инерции шара (без вывода), стержня, трубки (обруча) и цилиндра (диска). Теорема Штейнера.
Момент инерции твердого тела относительно оси — скалярная физическая величина, являющаяся мерой инертности тела при вращательном движении. Определяется как сумма произведений элементарных масс тела на квадраты их расстояний до оси вращения:
Моменты инерции однородных тел простых форм:
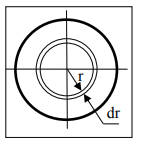
- Тонкое кольцо, трубка (обруч) радиуса : .
- Сплошной цилиндр (диск) радиуса : .
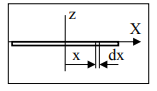
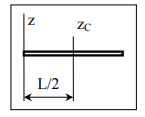
- Тонкий стержень длины (относительно оси через центр масс, перпендикулярно стержню): .
- Сплошной шар радиуса (относительно оси через центр): .
Теорема Гюйгенса-Штейнера: Момент инерции твердого тела относительно произвольной оси равен сумме момента инерции относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между этими осями:
Вычисление моментов инерции и доказательство теоремы Штейнера 1. Диск (сплошной цилиндр): Выделим тонкий цилиндрический слой радиусом и толщиной . Масса слоя . Интегрируем от до :
2. Стержень: Выделим на расстоянии от центра масс элемент длиной . Его масса .
Доказательство теоремы Штейнера: Рассмотрим две параллельные оси и , расстояние между которыми . Координаты частицы связаны как и . Момент инерции относительно оси : Раскроем скобки: Первое слагаемое — это момент инерции относительно оси . Второе слагаемое — это . Третье слагаемое содержит выражения и . Если ось проходит через центр масс, то координаты центра масс и , поэтому третье слагаемое равно нулю. Итог: .
6. Момент силы. Момент импульса материальной точки и механической системы. Уравнение моментов механической системы. Закон сохранения момента импульса. Основное уравнение динамики вращательного движения.
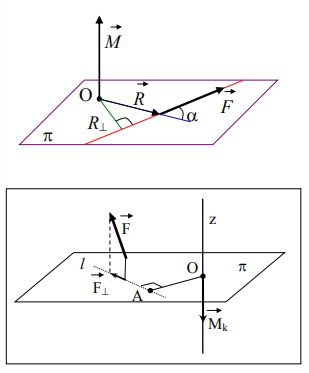
Момент силы относительно точки — вектор , где — радиус-вектор точки приложения силы. Момент импульса материальной точки относительно точки — вектор . Направлен перпендикулярно плоскости векторов и . Момент импульса механической системы — векторная сумма моментов импульса всех её точек: .
Уравнение моментов механической системы: Производная по времени от вектора суммарного момента импульса системы равна векторной сумме моментов только внешних сил, действующих на систему:
Закон сохранения момента импульса: Если суммарный момент внешних сил равен нулю (), то вектор момента импульса системы сохраняется (остается постоянным): (Также закон применим к проекциям: если момент внешних сил относительно какой-либо оси равен нулю, то ).
Основное уравнение динамики вращательного движения: Для твердого тела, вращающегося вокруг неподвижной оси : угловое ускорение прямо пропорционально моменту внешних сил и обратно пропорционально моменту инерции :
Вывод уравнения моментов и динамики вращательного движения Связь момента импульса и момента силы: Найдем производную от момента импульса точки : Первое слагаемое: (векторное произведение параллельных векторов). Второе слагаемое по II закону Ньютона () равно . Получаем: .
Переход к системе точек: Просуммируем производные для всех точек системы: . Внутренние силы подчиняются III закону Ньютона (равны, противоположны и лежат на одной прямой), поэтому сумма их моментов попарно обнуляется. Остаются только моменты внешних сил: .
Вывод : Рассмотрим момент импульса твердого тела относительно оси вращения . Скорость элементарной массы равна . Её импульс . Момент импульса этой точки относительно оси : . Суммируя по всему телу, получаем . Подставим это в уравнение моментов: . Для твердого тела , поэтому:
7. Работа. Кинетическая энергия. Связь работы с изменением кинетической энергии. Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси. Кинетическая энергия твёрдого тела, как сумма энергии поступательного движения со скоростью центра масс и вращательного движения вокруг оси, проходящей через центр масс (без вывода).
Работа силы на малом перемещении равна скалярному произведению: Полная работа на участке траектории: .
Кинетическая энергия материальной точки — величина, зависящая от массы и скорости: .
Связь работы с изменением кинетической энергии (Теорема о кинетической энергии): Изменение кинетической энергии материальной точки (или системы) на участке пути равно алгебраической сумме работ всех сил, действующих на неё на этом участке:
Кинетическая энергия твердого тела при вращении вокруг неподвижной оси: Вычисляется через момент инерции и угловую скорость :
Теорема Кёнига (без вывода): Полная кинетическая энергия твердого тела (или системы точек) равна сумме кинетической энергии поступательного движения его центра масс и кинетической энергии вращения тела относительно оси, проходящей через центр масс:
Вывод теоремы об изменении кинетической энергии и энергии вращения Доказательство : Запишем II закон Ньютона: . Умножим обе части скалярно на вектор малого перемещения : Сокращаем в левой части: . Заметим, что . Интегрируем обе части вдоль пути:
Вывод кинетической энергии вращения: Суммарная кинетическая энергия всех точек вращающегося тела: Линейная скорость каждой точки связана с угловой: . Подставляем: Так как сумма в правой части — это момент инерции , получаем:
8. Консервативные и неконсервативные силы. Работа в потенциальном поле. Потенциальная энергия. Потенциальная энергия упругих деформаций и силы тяжести (в общем случае и для однородного поля). Связь между потенциальной энергией и силой, градиент.
Консервативные силы — силы, зависящие только от взаимного расположения тел, работа которых не зависит от формы траектории, а определяется только начальным и конечным положением. (Гравитация, сила упругости, кулоновская сила). Работа таких сил по любому замкнутому контуру равна нулю: . Неконсервативные (диссипативные) силы — силы, работа которых зависит от пути (например, сила трения, сопротивления среды). Они рассеивают механическую энергию.
Потенциальная энергия — физическая величина, зависящая от положения тел, убыль которой равна работе консервативной силы:
Виды потенциальной энергии:
- Силы тяжести в общем случае (всемирное тяготение): (ноль энергии на бесконечности).
- Силы тяжести в однородном поле (вблизи Земли): (где — высота над выбранным нулевым уровнем).
- Упругих деформаций (пружина): .
- Для обобщенного закона Гука: (где — объем).
Связь между потенциальной энергией и силой: Вектор консервативной силы направлен в сторону скорейшего убывания потенциальной энергии и равен антиградиенту потенциальной энергии:
Математическая связь силы и энергии, вывод энергии гравитации Доказательство : Работа консервативной силы при малом перемещении равна . С другой стороны, эта работа равна убыли потенциальной энергии: . Полный дифференциал энергии: . Приравнивая, получаем: . Так как смещение произвольно, то , , . Что в векторном виде и есть .
Вывод потенциальной энергии гравитационного взаимодействия: Сила гравитации . Работа при перемещении из начальной точки в конечную вдоль радиус-вектора : Так как , получаем . Обычно .
9. Полная механическая энергия. Изменение полной механической энергии системы. Закон сохранения механической энергии.
Полная механическая энергия системы () — сумма её кинетической и потенциальной энергий:
Изменение полной механической энергии системы: Изменение полной механической энергии системы равно алгебраической сумме работ всех неконсервативных (диссипативных) сил, действующих в системе: (Неконсервативные силы, такие как трение, переводят механическую энергию во внутреннюю, то есть в тепло).
Закон сохранения механической энергии: Если на тело (или в системе тел) действуют только консервативные силы (или работа неконсервативных сил равна нулю), то полная механическая энергия системы остается постоянной:
Вывод закона и пример Теоретический вывод: По теореме об изменении кинетической энергии, изменение кинетической энергии равно суммарной работе всех сил (и консервативных, и неконсервативных): Но по определению работа консервативных сил равна убыли потенциальной энергии: Подставим это в первое уравнение: Перенесем конечные состояния влево, а начальные вправо: Если диссипативных сил нет (), получаем .
Пример применения (Вторая космическая скорость): Тело массой стартует с Земли (масса , радиус ) со скоростью . Энергия старта: . Чтобы тело покинуло Землю навсегда, на бесконечности его энергия должна стать равной нулю (остановилось и гравитация ноль): . По закону сохранения энергии: . С учетом , получаем .
Теория колебаний
10. Гармонические колебания. Амплитуда, частота, период, фаза колебаний. Понятия свободных и вынужденных колебаний.
Гармонические колебания — движения или состояния, параметры которых изменяются во времени по закону синуса или косинуса: .
- Амплитуда () — модуль максимального смещения от равновесного значения ().
- Фаза колебания () — аргумент гармонической функции. Начальная фаза () — фаза в момент времени .
- Циклическая (круговая) частота () — число колебаний за секунд (рад/с или 1/с).
- Частота () — число колебаний в секунду (Гц). Связь: .
- Период () — минимальный промежуток времени, через который параметры процесса повторяются: .
Свободные незатухающие колебания происходят в консервативной системе около положения устойчивого равновесия под действием квазиупругой силы. Вынужденные колебания — колебания, происходящие под действием внешней периодической силы (например, ).
Вывод уравнения гармонических колебаний — положение равновесия. Второй закон Ньютона для тела под действием квазиупругой силы имеет вид: . Учитывая, что , получаем , или: где . Это линейное обыкновенное дифференциальное уравнение второго порядка, решением которого и являются гармонические функции от времени .
Пусть координата
11. Квазиупругая сила. Дифференциальное уравнение свободных гармонических колебаний. Собственные частоты математического, физического и пружинного маятников.
Квазиупругая сила — консервативная сила вблизи положения устойчивого равновесия, которую можно записать в векторной форме как . Она направлена к положению равновесия и пропорциональна смещению. Дифференциальное уравнение свободных колебаний: .
Собственные частоты и периоды:
Пружинный маятник: Уравнение . Частота . Период .
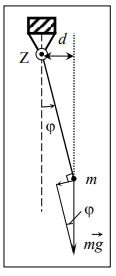
Математический маятник: Уравнение . Частота . Период .
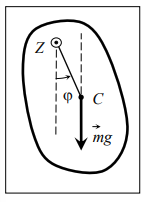
Физический маятник: Уравнение . Частота . Период .
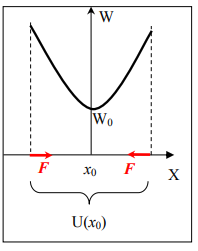
Положение равновесия и вывод уравнений маятников Положение равновесия и квазиупругая сила: Если в точке наблюдается локальный минимум потенциальной энергии (), это устойчивое равновесие. При малых смещениях силу можно разложить в ряд Тейлора: .
Математический маятник: Касательное ускорение . При малых колебаниях , длина дуги , . Отсюда .
Физический маятник: Закон вращательного движения . Момент силы тяжести . Учитывая , получаем .
12. Энергия и импульс гармонического осциллятора. Фазовая траектория.
Импульс осциллятора : . (Среднее по времени значение импульса равно нулю: ).
Механическая энергия: Механическая энергия в гармоническом колебании сохраняется и равна: (Средняя кинетическая энергия равна средней потенциальной: ).
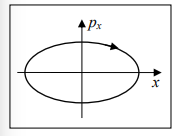
Фазовая траектория — кривая в двумерном фазовом пространстве, координатами которого являются координата и обобщенный импульс . Для свободного незатухающего осциллятора фазовая траектория представляет собой эллипс.
Вывод уравнения фазовой траектории Разделим левую и правую части на полную энергию : Используя соотношение , перепишем уравнение в каноническом виде: Это уравнение эллипса. Главные полуоси этого эллипса: по оси координат , по оси импульсов .
Из закона сохранения энергии для пружинного маятника:
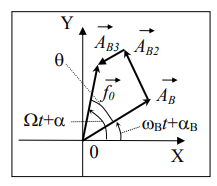
13. Векторная диаграмма. Сложение гармонических колебаний одного направления равных частот. Сложение колебаний одинакового направления близких частот. Биения.
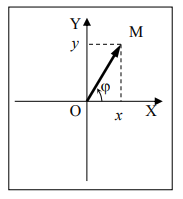
Векторная диаграмма (амплитудная) — представление колебания в виде радиус-вектора длины , вращающегося вокруг начала координат с угловой скоростью .
Сложение равных частот (): Результирующее колебание происходит с той же частотой. По теореме косинусов квадрат результирующей амплитуды:
- Усиление () при .
- Ослабление () при .
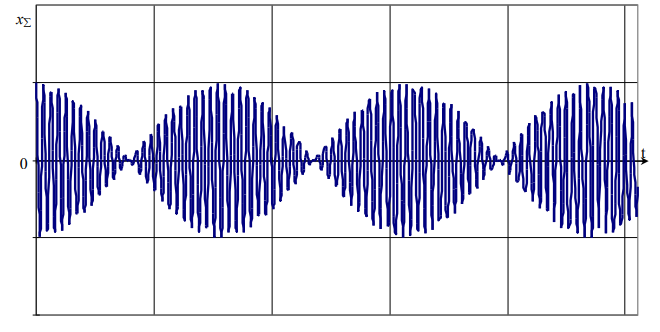
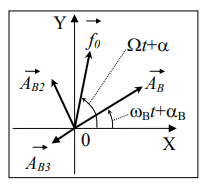
Биения (сложение близких частот, ): Возникает периодическое изменение амплитуды и скачкообразное изменение фазы. При равных амплитудах :
Вывод формул сложения и биений Метод векторных диаграмм (равные частоты): Зададим два колебания векторами и . Угол между ними равен . Вектор суммы ищется по теореме косинусов, что напрямую даёт амплитуду результирующего колебания.
Вывод биений (для , , ): Приняв начальные фазы для упрощения: Пренебрегая малым в фазе быстрого сомножителя, получаем медленно меняющуюся амплитуду , умноженную на . Это явление называется биением.
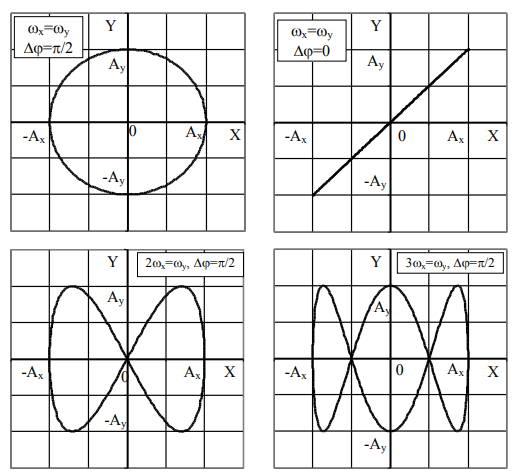
14. Сложение взаимно перпендикулярных гармонических колебаний равных и кратных частот. Фигуры Лиссажу.
Если точка совершает колебания по двум взаимно перпендикулярным осям и :
1. Равные частоты (): Траекторией в общем случае является уравнение линии второго порядка (эллипс), оси которого повернуты.
- Если фазы отличаются на (то есть в формулах лекции), получается канонический эллипс: .
- Если (отличие фаз на 0 или ), эллипс вырождается в отрезок прямой.
2. Рациональное отношение частот (): Траектория является замкнутой кривой сложной формы, которая называется фигурой Лиссажу. Соотношение частот можно определить, посчитав максимальное количество точек пересечения фигуры и прямой, параллельной соответствующей оси.
Вывод уравнения траектории . Введем . . Подставим и : Перенесём слагаемое влево и возведём обе части в квадрат: Раскрывая скобки и перегруппировывая, получаем уравнение траектории:
Пусть
15. Свободные затухающие колебания. Дифференциальное уравнение и его решение. Частота свободных затухающих колебаний. Коэффициент затухания, время релаксации, декремент и логарифмический декремент затухания. Добротность.
Дифференциальное уравнение: Возникает при наличии вязкой среды с силой сопротивления . где — коэффициент затухания, — собственная частота.
Решение (при ): . Амплитуда экспоненциально убывает.
Характеристики затухания:
Циклическая частота: .
Время релаксации (): Время, за которое амплитуда убывает в раз. .
Декремент затухания (): Отношение амплитуд спустя период . .
Логарифмический декремент (): .
Добротность (): . Характеризует скорость убывания энергии.
Решение уравнения и фазовый портрет Вывод уравнения: По II закону Ньютона . Делим на , переносим всё влево и вводим , .
Поиск решения: Ищем в виде . Характеристическое уравнение: . Дискриминант . При корни комплексные, что с помощью формулы Эйлера приводит к затухающей синусоиде: .
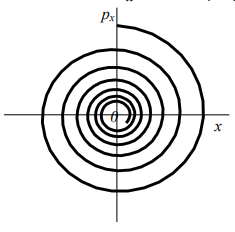
Фазовый портрет: При затухающих колебаниях амплитуда и импульс стремятся к нулю. Фазовая траектория представляет собой сужающуюся к нулевой точке спираль (вращение происходит по часовой стрелке).

16. Вынужденные колебания. Дифференциальное уравнение. Установившиеся вынужденные колебания. Механический резонанс. Резонансная частота.
Вынужденные колебания происходят в вязкой среде под действием периодической вынуждающей силы . Дифференциальное уравнение: где , — частота вынуждающей силы.
Установившиеся вынужденные колебания: Со временем свободные затухающие колебания исчезают, остаются только вынужденные с частотой . Частное решение ищется в виде: .
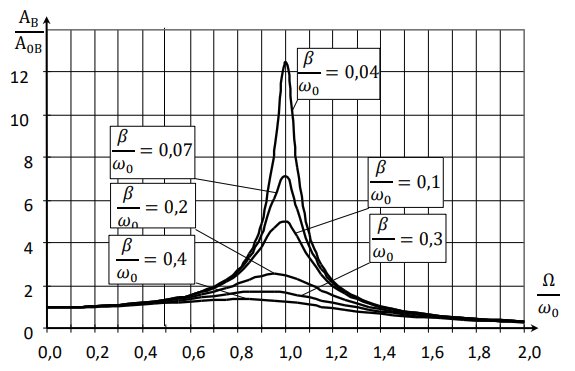
Механический резонанс — явление резкого возрастания амплитуды установившихся колебаний при приближении частоты вынуждающей силы к собственной резонансной частоте системы. Резонансная частота: . Резонанс возможен только при слабом затухании ().
Векторная диаграмма и резонансная кривая Амплитуда вынужденных колебаний: Для нахождения амплитуды строится векторная диаграмма для уравнения , где слагаемые соответствуют величинам , и . Из диаграммы по теореме Пифагора: . Откуда:
Поиск резонансной частоты: Для нахождения максимума амплитуды берётся производная по от выражения под корнем и приравнивается к нулю: . Решая это уравнение, получаем . График зависимости амплитуды от частоты называется резонансной кривой. Чем меньше затухание , тем выше и у́же (острее) пик кривой.
Паттерн 1. Кинематика точки (Векторы и производные)
Как узнать: Дана зависимость радиус-вектора от времени или скорости . Просят найти скорость, ускорение, тангенциальное () и нормальное () ускорения. Алгоритм решения:
- Скорость: Берешь первую производную от по времени: . Модуль скорости: .
- Полное ускорение: Берешь вторую производную от (или первую от ): . Модуль: .
- Тангенциальное ускорение (): Ищется через скалярное произведение векторов и , деленное на модуль скорости: (Это самый быстрый способ, не нужно брать производную от корня).
- Нормальное ускорение (): Ищется по теореме Пифагора из полного ускорения:
Паттерн 2. Кинематика и динамика вращения
Как узнать: Дан закон изменения угла , угловой скорости или сказано, что тело тормозит от об/мин до остановки. Просят найти момент инерции , момент сил , число оборотов или работу. Алгоритм решения:
- Связь : Помни, что , а . Если нужно найти угол поворота за время , берешь интеграл: .
- Основной закон динамики: .
- Работа и энергия: Работа момента сил идет на изменение кинетической энергии вращения: (Переводи обороты в радианы: , ).
Паттерн 3. Работа переменной силы (Интегрирование)
Как узнать: Дана сила, зависящая от координаты (например, ). Просят найти работу силы и скорость в конце пути. Алгоритм решения:
- Работа: Берешь определенный интеграл от силы по координате на заданном участке:
- Скорость: Применяешь теорему об изменении кинетической энергии: Подставляешь найденную работу и выражаешь искомую скорость .
Паттерн 4. Удар с вращением (ЗСМИ + Теорема Штейнера)
Как узнать: Стержень (или дверь) висит на шарнире. В него летит пуля/пластилиновый шарик и застревает. Просят найти угловую скорость после удара или угол отклонения. Алгоритм решения:
- Момент инерции системы (): Вычисляешь момент инерции стержня относительно шарнира (по теореме Штейнера: ) и прибавляешь момент инерции застрявшей пули ().
- Закон сохранения момента импульса (ЗСМИ): Обычный импульс не сохраняется (шарнир держит), сохраняется момент импульса относительно оси шарнира: Выражаешь .
- Если просят угол отклонения: Пишешь закон сохранения энергии. Вся кинетическая энергия вращения переходит в потенциальную энергию подъема центров масс стержня и пули ().
Паттерн 5. Вывод периода малых колебаний
Как узнать: Нарисована сложная система (стержень + пружина + груз), просят найти период или частоту малых колебаний. Алгоритм решения:
- Записываешь уравнение моментов относительно оси вращения: .
- Расписываешь моменты возвращающих сил при отклонении на малый угол :
- Для силы тяжести: .
- Для пружины: . Момент: .
- Подставляешь всё в уравнение, собираешь члены с и делишь на :
- Выражение в скобках — это квадрат собственной частоты . Период .
Паттерн 6. Формулы затухающих и вынужденных колебаний
Как узнать: В задаче нет рисунков, дан просто текст со словами «логарифмический декремент», «добротность», «время релаксации», «резонанс». Алгоритм решения: Это задачи чисто на знание связок между формулами (шпаргалка из 15 и 16 вопроса). Выписываешь дано и жонглируешь уравнениями:
- (коэффициент затухания и время релаксации).
- (частота затухающих).
- (логарифмический декремент).
- (добротность).
- (резонансная частота).